

Question: A Problem 3. Figure 3 depicts a back-wheel driven robotic forklift. The rotation of the driving wheel results in the velocity JB of the
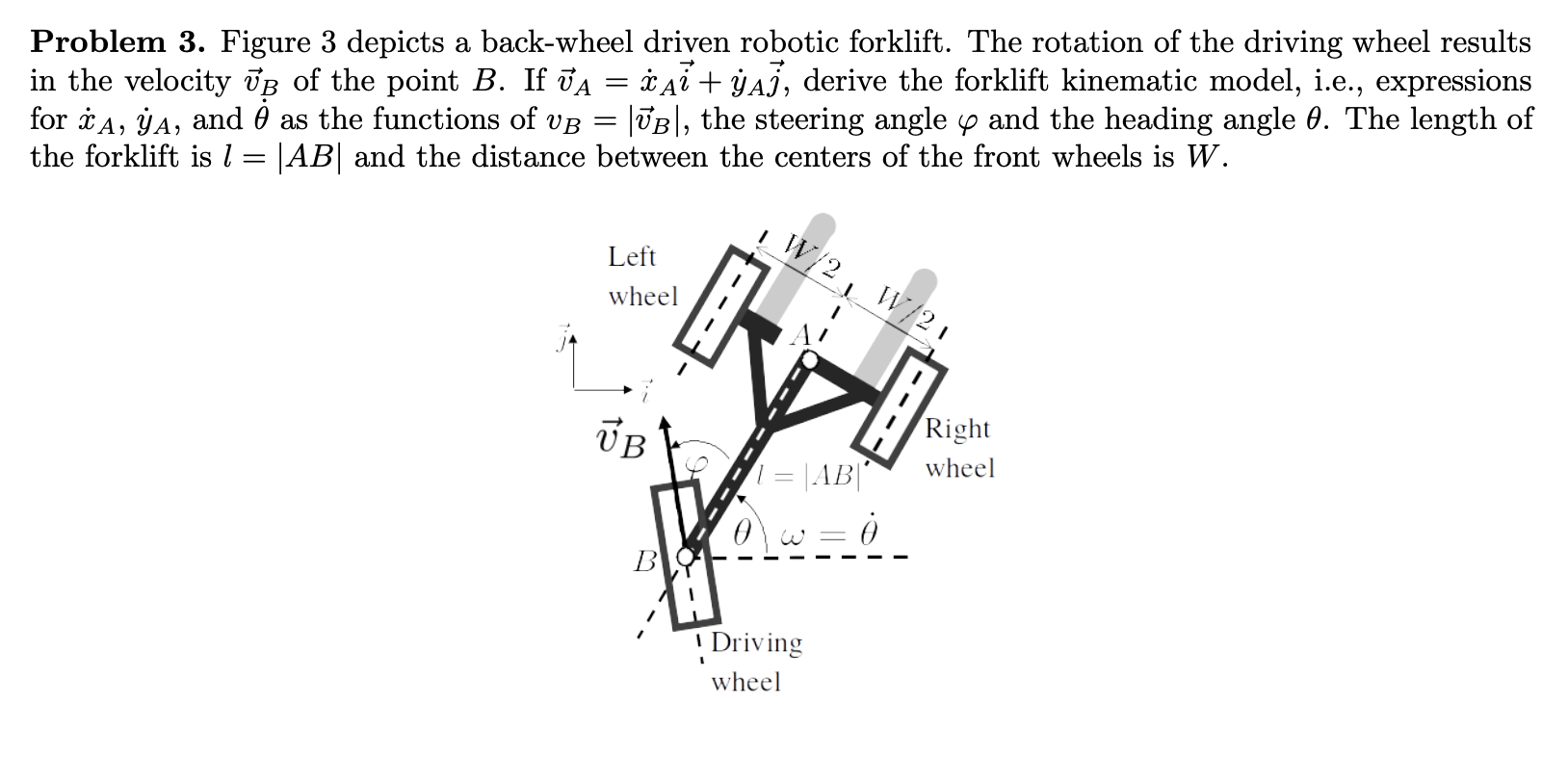
A Problem 3. Figure 3 depicts a back-wheel driven robotic forklift. The rotation of the driving wheel results in the velocity JB of the point B. If = + a], derive the forklift kinematic model, i.e., expressions for A, YA, and 0 as the functions of VB = |B|, the steering angle & and the heading angle 0. The length of the forklift is l |AB| and the distance between the centers of the front wheels is W. = Left wheel W/2 W/21 Right UB wheel = |AB|' = Driving wheel
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock