

Question: As shown in Figure 3 , a moving camera takes two images of the same object at two poses. Two coordinate frames represented by F
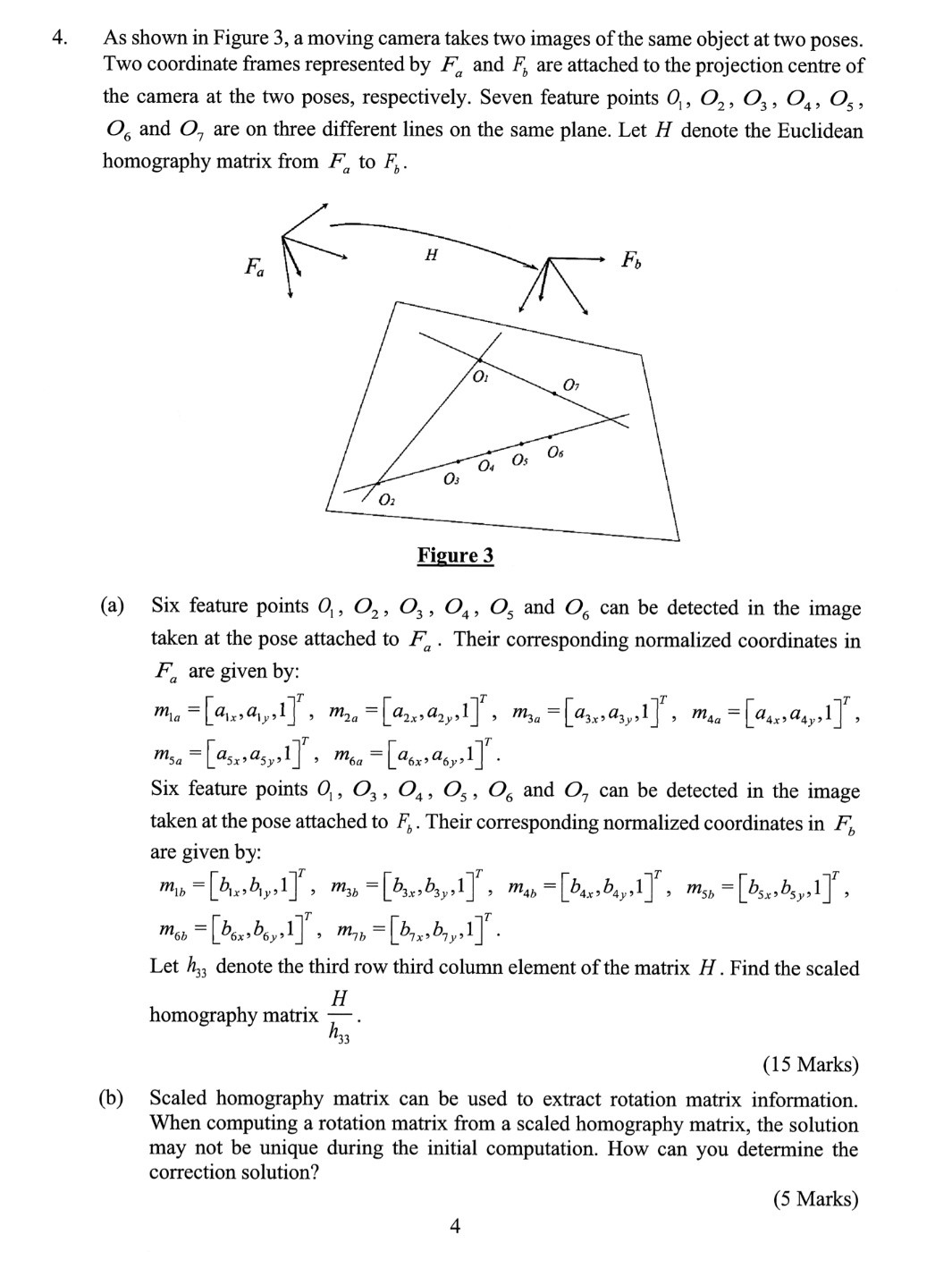
As shown in Figure a moving camera takes two images of the same object at two poses. Two coordinate frames represented by and are attached to the projection centre of the camera at the two poses, respectively. Seven feature points and are on three different lines on the same plane. Let denote the Euclidean homography matrix from to
a Six feature points and can be detected in the image taken at the pose attached to Their corresponding normalized coordinates in are given by:
Six feature points and can be detected in the image taken at the pose attached to Their corresponding normalized coordinates in are given by:
Let denote the third row third column element of the matrix Find the scaled homography matrix
Marks
b Scaled homography matrix can be used to extract rotation matrix information. When computing a rotation matrix from a scaled homography matrix, the solution may not be unique during the initial computation. How can you determine the correction solution?
Marks
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock