

Question: Consider the 3 PRR planar parallel robot which is discussed in our lectures as shown below. The formulation of this robot is given in the
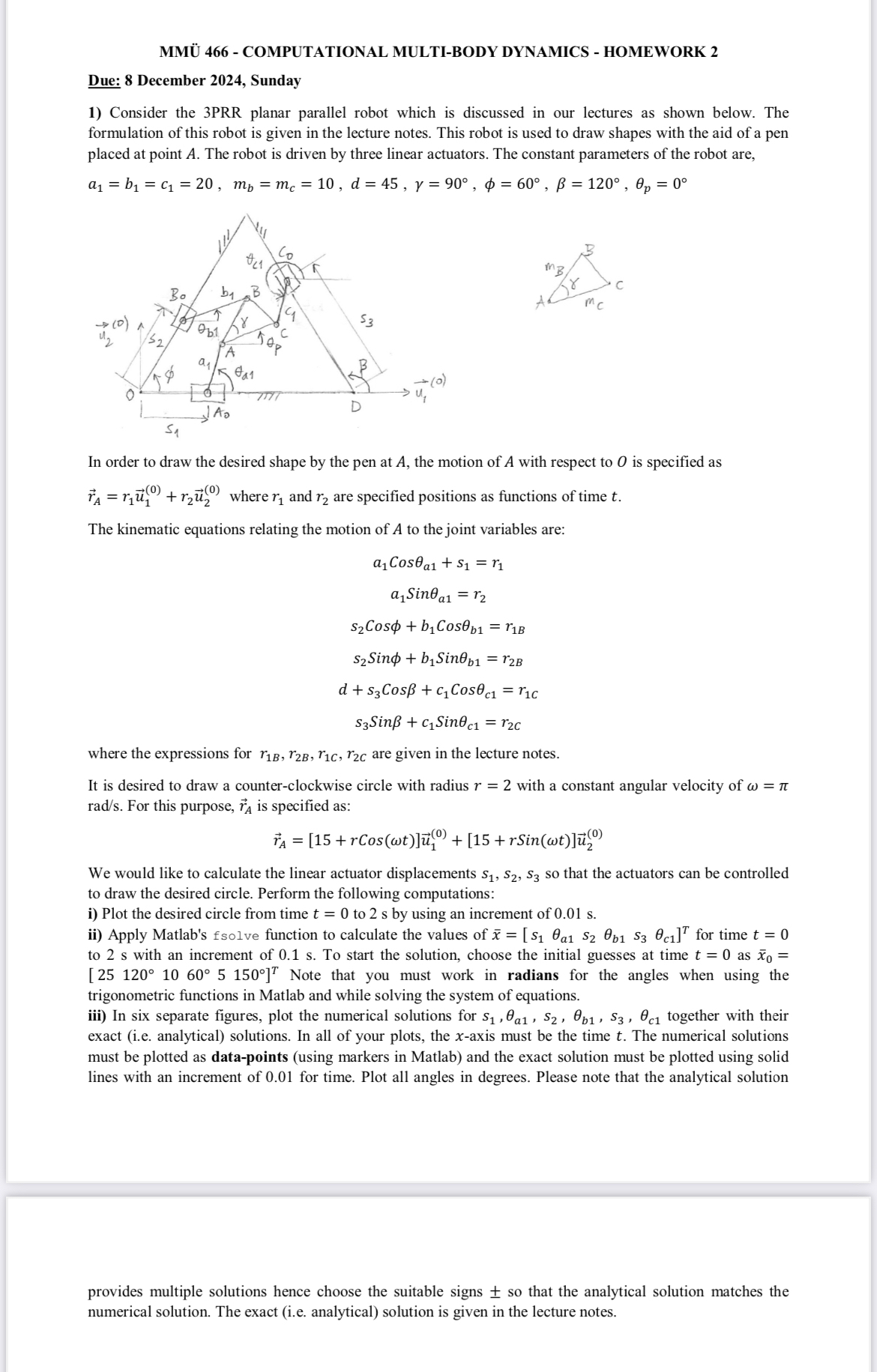
Consider the PRR planar parallel robot which is discussed in our lectures as shown below. The formulation of this robot is given in the lecture notes. This robot is used to draw shapes with the aid of a pen placed at point The robot is driven by three linear actuators. The constant parameters of the robot are,
In order to draw the desired shape by the pen at the motion of A with respect to is specified as vecvecvec where and are specified positions as functions of time
The kinematic equations relating the motion of to the joint variables are:
Cos
Sin
CosCos
SinSin
CosCos
SinSin
where the expressions for are given in the lecture notes.
It is desired to draw a counterclockwise circle with radius with a constant angular velocity of For this purpose, vec is specified as:
vecrCosrSin
We would like to calculate the linear actuator displacements so that the actuators can be controlled to draw the desired circle. Perform the following computations:
i Plot the desired circle from time to s by using an increment of s
ii Apply Matlab's fsolve function to calculate the values of for time to s with an increment of s To start the solution, choose the initial guesses at time as transpose
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock