

Question: Consider the two-link Cartesian robot shown below. Derive the complete set of forward kinematic equations by establishing the appropriate DH coordinates frames, constructing a
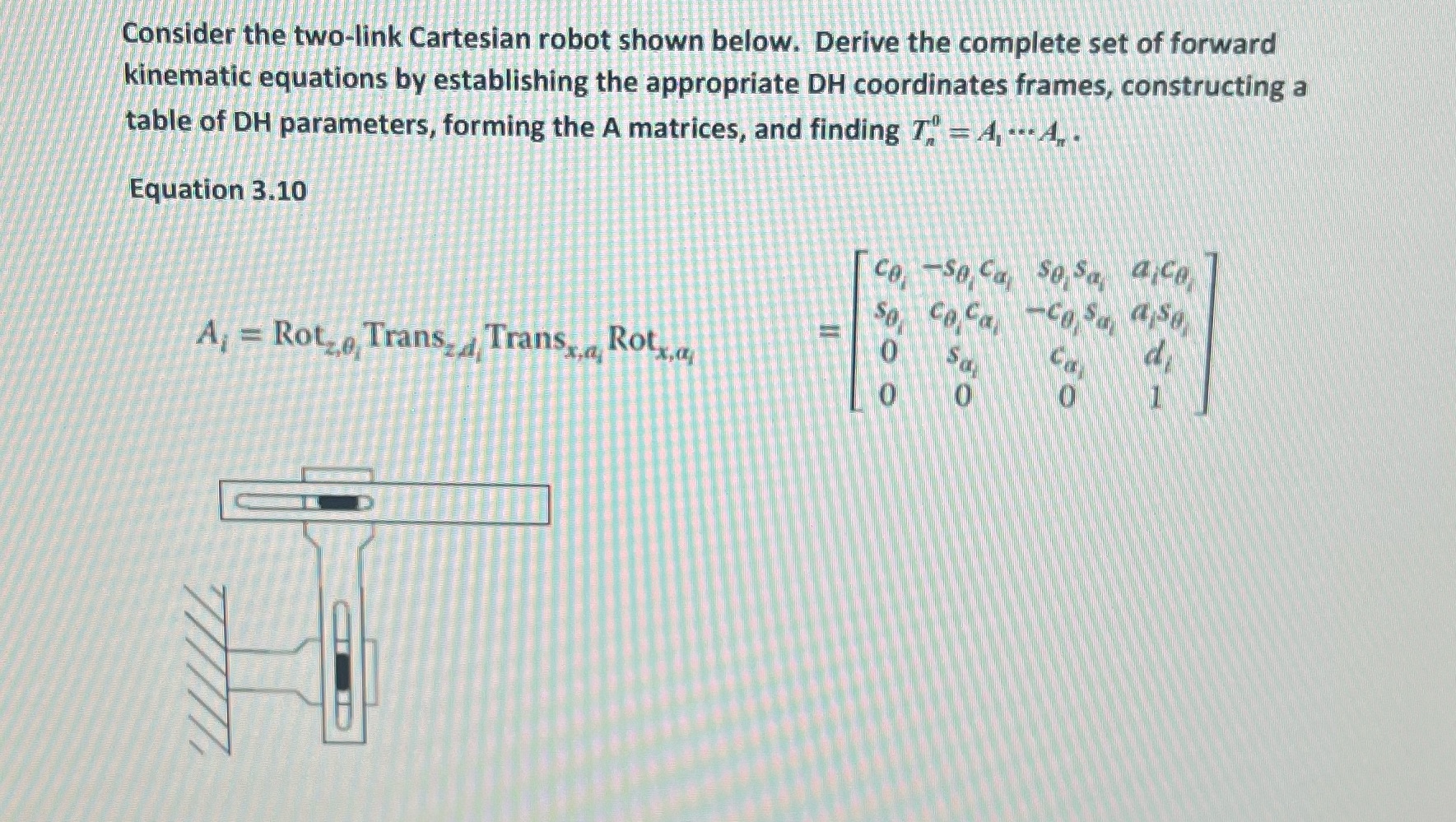
Consider the two-link Cartesian robot shown below. Derive the complete set of forward kinematic equations by establishing the appropriate DH coordinates frames, constructing a table of DH parameters, forming the A matrices, and finding T = A A. Equation 3.10 Co-So Ca Sosa aco Co Ca 50. 0 A = Rote, Trans, Trans, Rota 0 d Ca 0
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock