

Question: Q 4 . ( 3 Points ) Consider the two - link planar robot in Q 3 . Write a MATLAB code to calculate the
Q Points
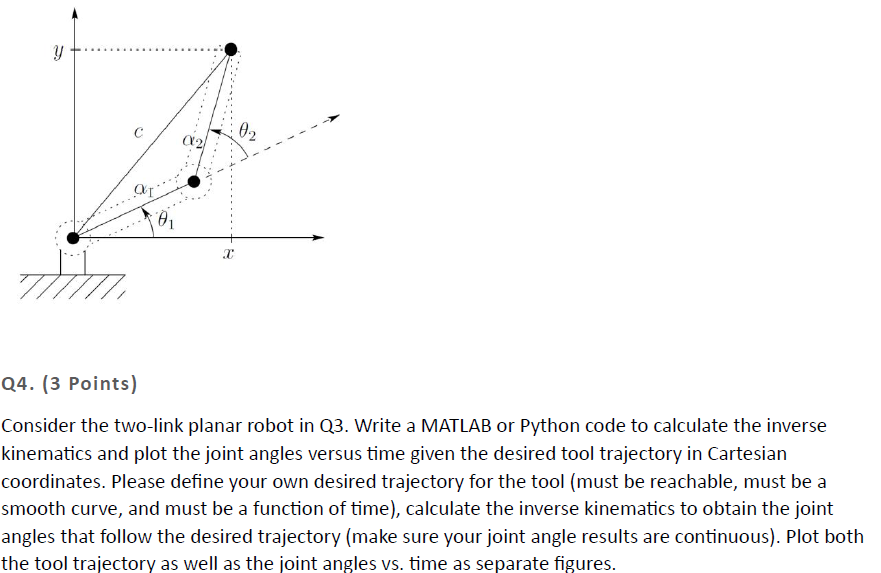
Consider the twolink planar robot in Q Write a MATLAB code to calculate the inverse
kinematics and plot the joint angles versus time given the desired tool trajectory in Cartesian
coordinates. Please define your own desired trajectory for the tool must be reachable, must be a
smooth curve, and must be a function of time calculate the inverse kinematics to obtain the joint
angles that follow the desired trajectory make sure your joint angle results are continuous Plot both
the tool trajectory as well as the joint angles vs time as separate figures.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock