

Question: ! ! ! Dont need the answer!!!! I just want to know why i only convert x 2 to r * theta and not x
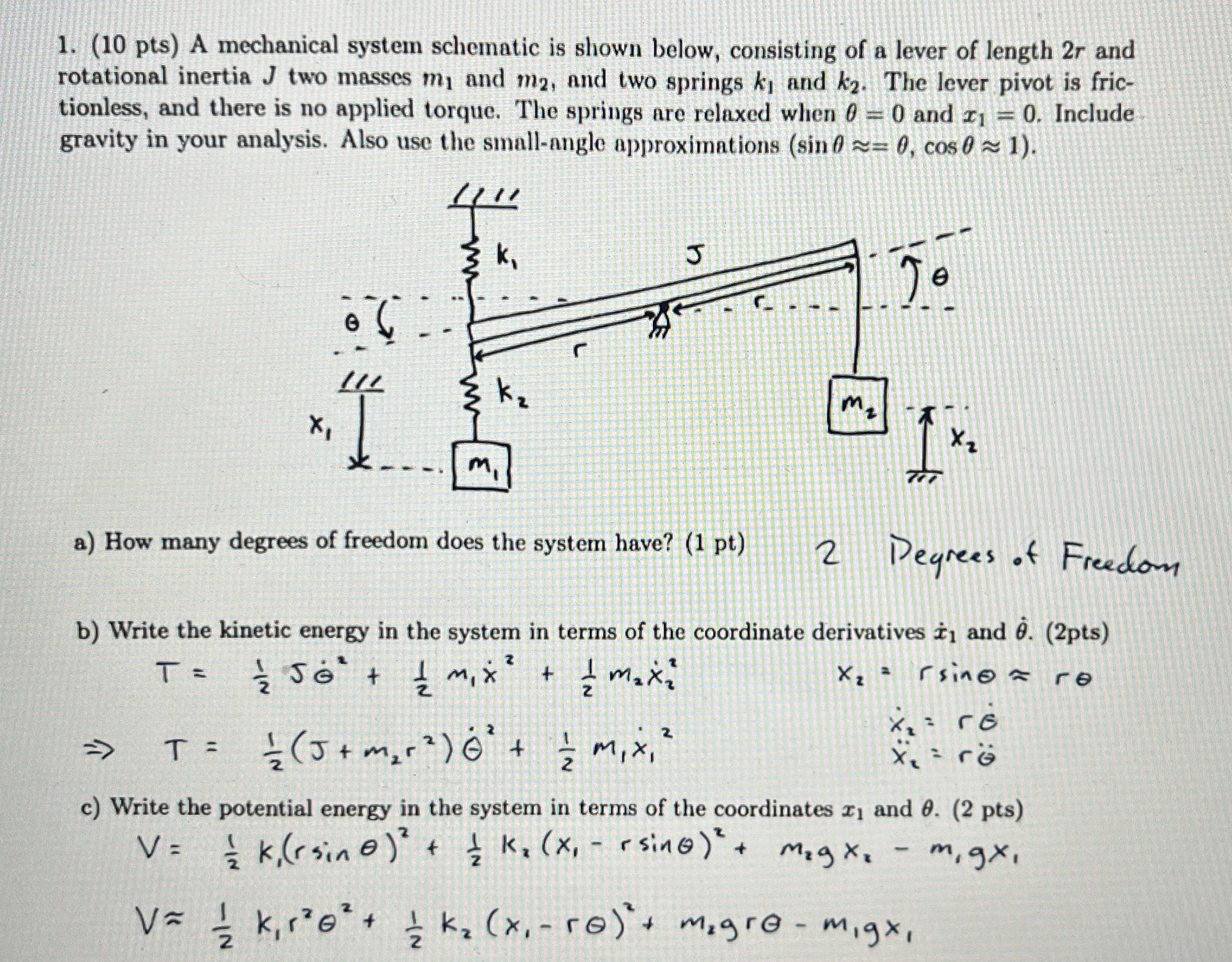
Dont need the answer!!!! I just want to know why i only convert x to rtheta and not x pts A mechanical system schematic is shown below, consisting of a lever of length and rotational inertia two masses and and two springs and The lever pivot is frictionless, and there is no applied torque. The springs are relaxed when and Include gravity in your analysis. Also use the smallangle approximations ~~
a How many degrees of freedom does the system have? pt Degrees of Freedom
b Write the kinetic energy in the system in terms of the coordinate derivatives and pts
~~
c Write the potential energy in the system in terms of the coordinates and pts
~~
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock