

Question: Given the following mechanical system b m F Using Matlab show how each of the PID controller parameters Kp, Ki, and Kd contribute to
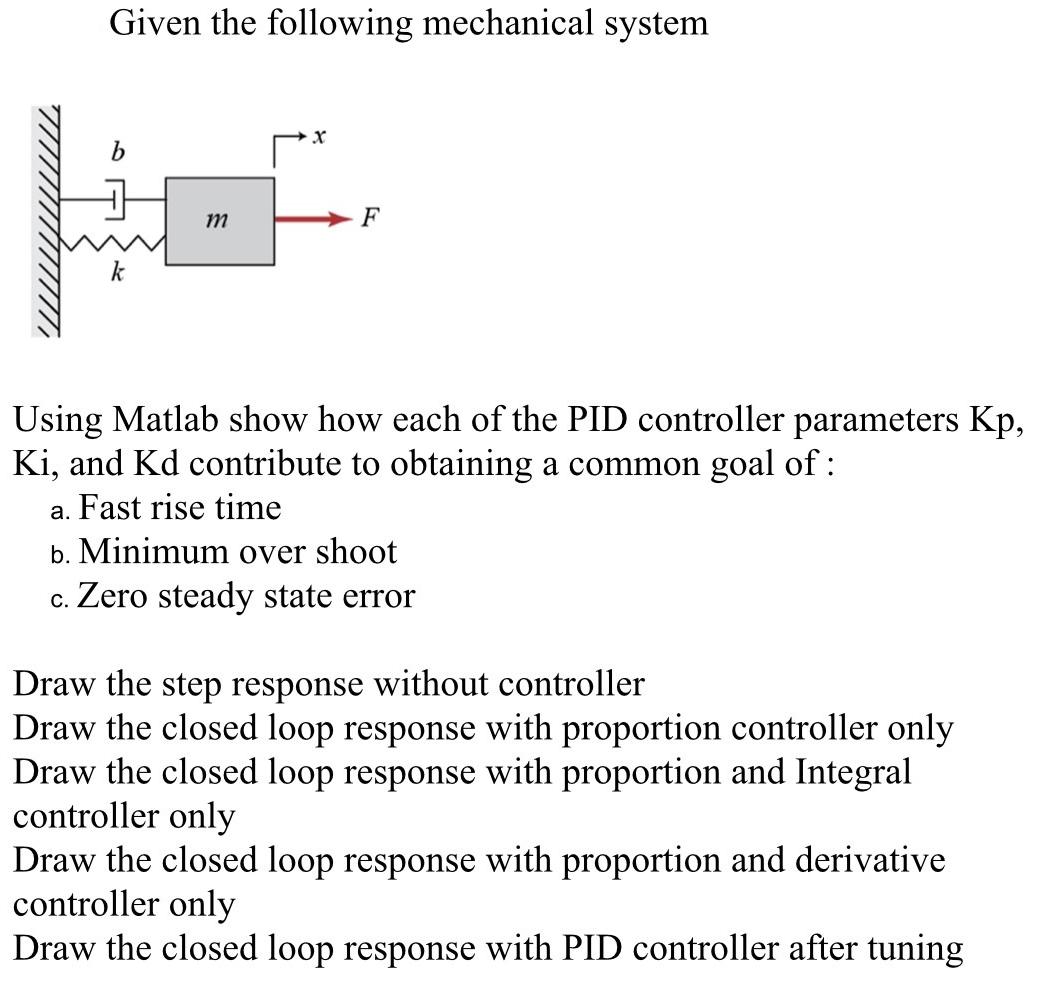
Given the following mechanical system b m F Using Matlab show how each of the PID controller parameters Kp, Ki, and Kd contribute to obtaining a common goal of: a. Fast rise time b. Minimum over shoot c. Zero steady state error Draw the step response without controller Draw the closed loop response with proportion controller only Draw the closed loop response with proportion and Integral controller only Draw the closed loop response with proportion and derivative controller only Draw the closed loop response with PID controller after tuning Given the following mechanical system b m F Using Matlab show how each of the PID controller parameters Kp, Ki, and Kd contribute to obtaining a common goal of: a. Fast rise time b. Minimum over shoot c. Zero steady state error Draw the step response without controller Draw the closed loop response with proportion controller only Draw the closed loop response with proportion and Integral controller only Draw the closed loop response with proportion and derivative controller only Draw the closed loop response with PID controller after tuning
Step by Step Solution
3.45 Rating (155 Votes )
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts