

Question: For the control system given, (a) Sketch, by hand, its root locus for Ge(s) = K. When sketching the root locus, if necessary, make
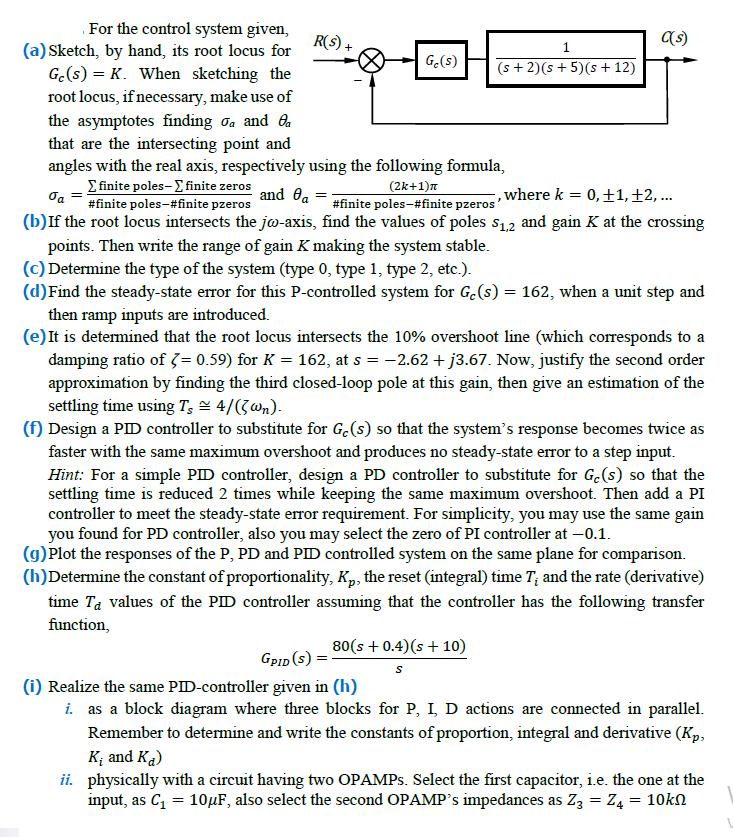
For the control system given, (a) Sketch, by hand, its root locus for Ge(s) = K. When sketching the root locus, if necessary, make use of the asymptotes finding a and a that are the intersecting point and C(s) R(S) + 1 Ge(s) (s+2)(s+5)(s +12) angles with the real axis, respectively using the following formula, finite poles-finite zeros and a #finite poles-# finite pzeros (2k+1) #finite poles-#finite pzeros' , where k = 0, +1, +2,... (b) If the root locus intersects the jo-axis, find the values of poles 51,2 and gain K at the crossing points. Then write the range of gain K making the system stable. (c) Determine the type of the system (type 0, type 1, type 2, etc.). (d) Find the steady-state error for this P-controlled system for Ge(s) = 162, when a unit step and then ramp inputs are introduced. (e) It is determined that the root locus intersects the 10% overshoot line (which corresponds to a damping ratio of
Step by Step Solution
There are 3 Steps involved in it
a Root locus for Ges K The transfer function for the given control system is Gs s5s2s3s12 The number of finite poles is 2 and the number of finite zeros is also 2 Therefore the root locus will start f... View full answer

Get step-by-step solutions from verified subject matter experts