

Question: Implement Monte Carlo localization for a simulated robot with range sensors. A grid map and range data are available from the code repository at
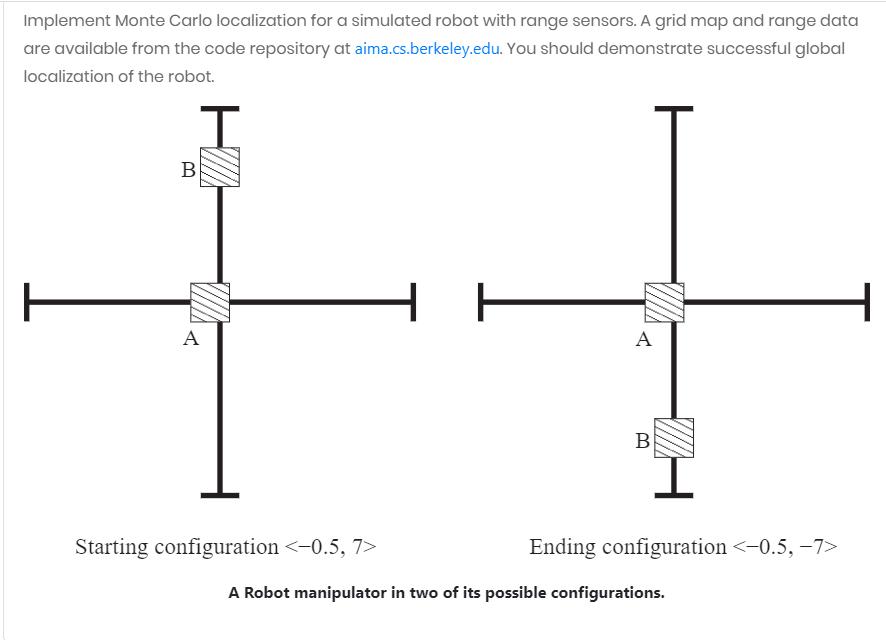
Implement Monte Carlo localization for a simulated robot with range sensors. A grid map and range data are available from the code repository at aima.cs.berkeley.edu. You should demonstrate successful global localization of the robot. I A B A Starting configuration B WIN Ending configuration A Robot manipulator in two of its possible configurations.
Step by Step Solution
There are 3 Steps involved in it
Monte Carlo Localization In samplingbased methods one represents the density p x k Z k by a set of N random samples or particles S k S k i 1N drawn from it We are able to do this because of the essent... View full answer

Get step-by-step solutions from verified subject matter experts