

Question: In this unity feedback system, plant transfer function is given as P = ying these conditions for the closed loop system: i) closed loop
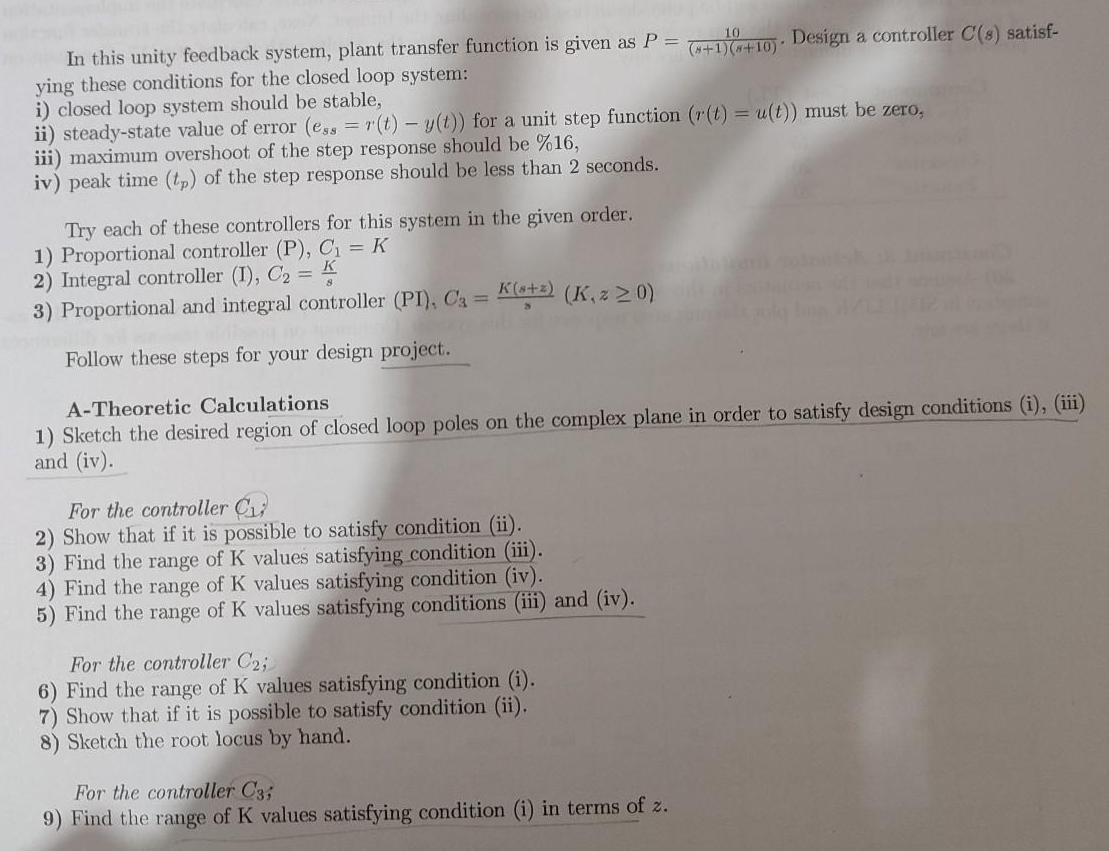
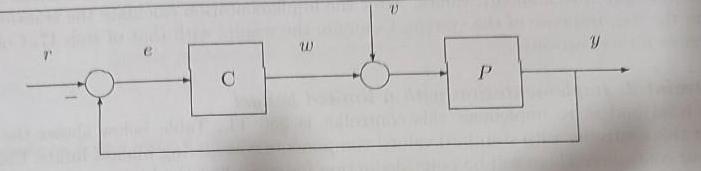
In this unity feedback system, plant transfer function is given as P = ying these conditions for the closed loop system: i) closed loop system should be stable, ii) steady-state value of error (ess=r(t)- y(t)) for a unit step function (r(t) = u(t)) must be zero, iii) maximum overshoot of the step response should be %16, iv) peak time (tp) of the step response should be less than 2 seconds. Try each of these controllers for this system in the given order. 1) Proportional controller (P), C = K 2) Integral controller (I), C = K 3) Proportional and integral controller (PI), C = K(+2) (K,z0) Follow these steps for your design project. A-Theoretic Calculations 1) Sketch the desired region of closed loop poles on the complex plane in order to satisfy design conditions (i), (iii) and (iv). For the controller C 2) Show that if it is possible to satisfy condition (ii). 3) Find the range of K values satisfying condition (iii). 4) Find the range of K values satisfying condition (iv). 5) Find the range of K values satisfying conditions (iii) and (iv). (+1)(+10). Design a controller C(s) satisf- For the controller C2; 6) Find the range of K values satisfying condition (i). 7) Show that if it is possible to satisfy condition (ii). 8) Sketch the root locus by hand. For the controller C3; 9) Find the range of K values satisfying condition (i) in terms of z. 2 C W P
Step by Step Solution
3.41 Rating (151 Votes )
There are 3 Steps involved in it
Answer CODE R... View full answer

Get step-by-step solutions from verified subject matter experts