

Question: Linear transformations and rotations in 3 dimensions Define a series of movements for a robot clamp to insert a pin located in the coordinates (4,0,0),
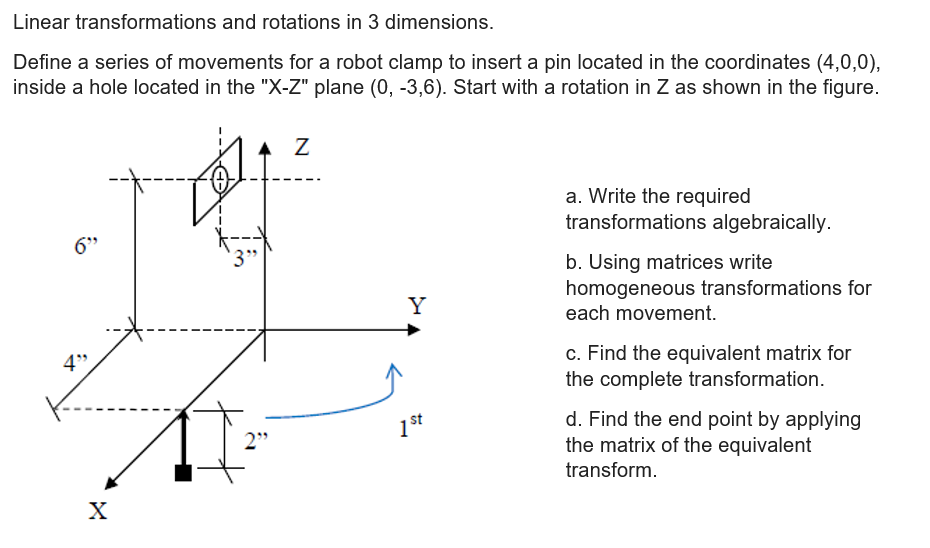
Linear transformations and rotations in 3 dimensions Define a series of movements for a robot clamp to insert a pin located in the coordinates (4,0,0), inside a hole located in the "X-Z" plane (0, -3,6). Start with a rotation in Z as shown in the figure. ite the required a. Wr transformations algebraically 6" 3" b. Using matrices write homogeneous transformations for each movement. C. Find the equivalent matrix for the complete transformation d. Find the end point by applying the matrix of the equivalent transform st 2" Linear transformations and rotations in 3 dimensions Define a series of movements for a robot clamp to insert a pin located in the coordinates (4,0,0), inside a hole located in the "X-Z" plane (0, -3,6). Start with a rotation in Z as shown in the figure. ite the required a. Wr transformations algebraically 6" 3" b. Using matrices write homogeneous transformations for each movement. C. Find the equivalent matrix for the complete transformation d. Find the end point by applying the matrix of the equivalent transform st 2
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts