

Question: Objective: Examine a graph - based path planning algorithm for robot motion planning. For path planning, the computing agent of a driverless car ( e
Objective: Examine a graphbased path planning algorithm for robot motion planning.
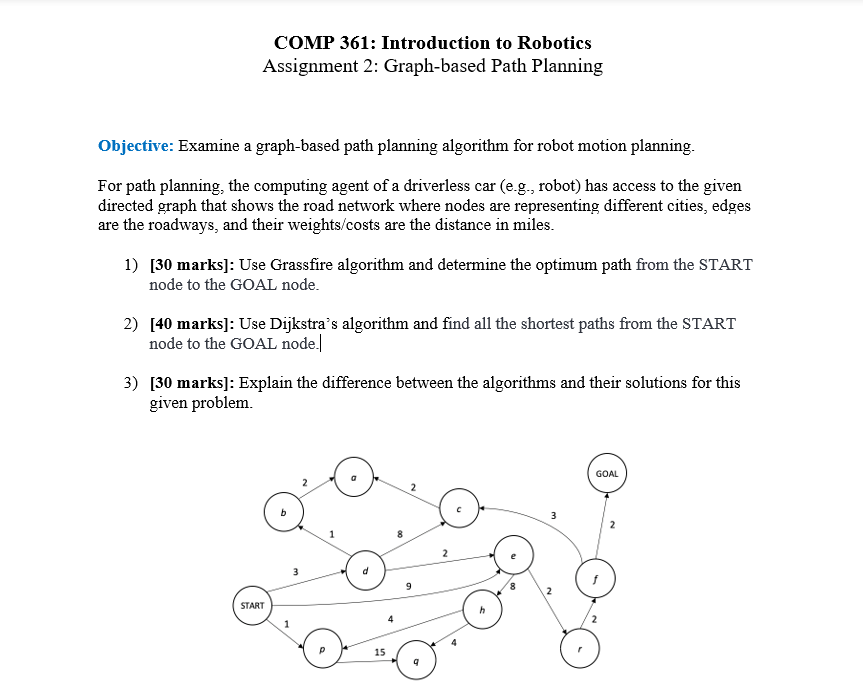
For path planning, the computing agent of a driverless car eg robot has access to the given
directed graph that shows the road network where nodes are representing different cities, edges
are the roadways, and their weightscosts are the distance in miles.
marks: Use Grassfire algorithm and determine the optimum path from the START
node to the GOAL node.
marks: Use Dijkstra's algorithm and find all the shortest paths from the START
node to the GOAL node.
marks: Explain the difference between the algorithms and their solutions for this
given problem.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock