

Question: Objective: Examine a graph-based path planning algorithm for robot motion planning. For path planning, the computing agent of a driverless car (e.g., robot) has access
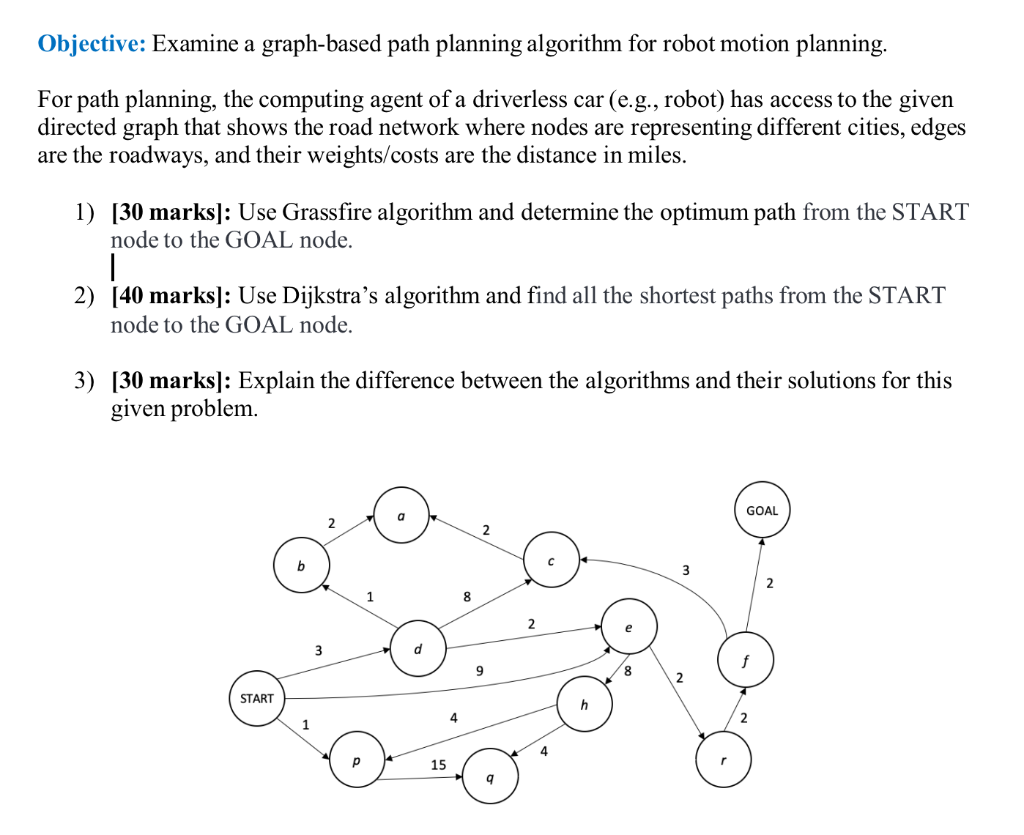
Objective: Examine a graph-based path planning algorithm for robot motion planning. For path planning, the computing agent of a driverless car (e.g., robot) has access to the given directed graph that shows the road network where nodes are representing different cities, edges are the roadways, and their weights/costs are the distance in miles. 1) [30 marks]: Use Grassfire algorithm and determine the optimum path from the START node to the GOAL node. 2) [40 marks]: Use Dijkstra's algorithm and find all the shortest paths from the START node to the GOAL node. 3) [30 marks]: Explain the difference between the algorithms and their solutions for this given
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts