

Our goal is for the robotic arm (Fig 25.32 )o start in Position (a) and reach position
Fantastic news! We've Found the answer you've been seeking!
Question:
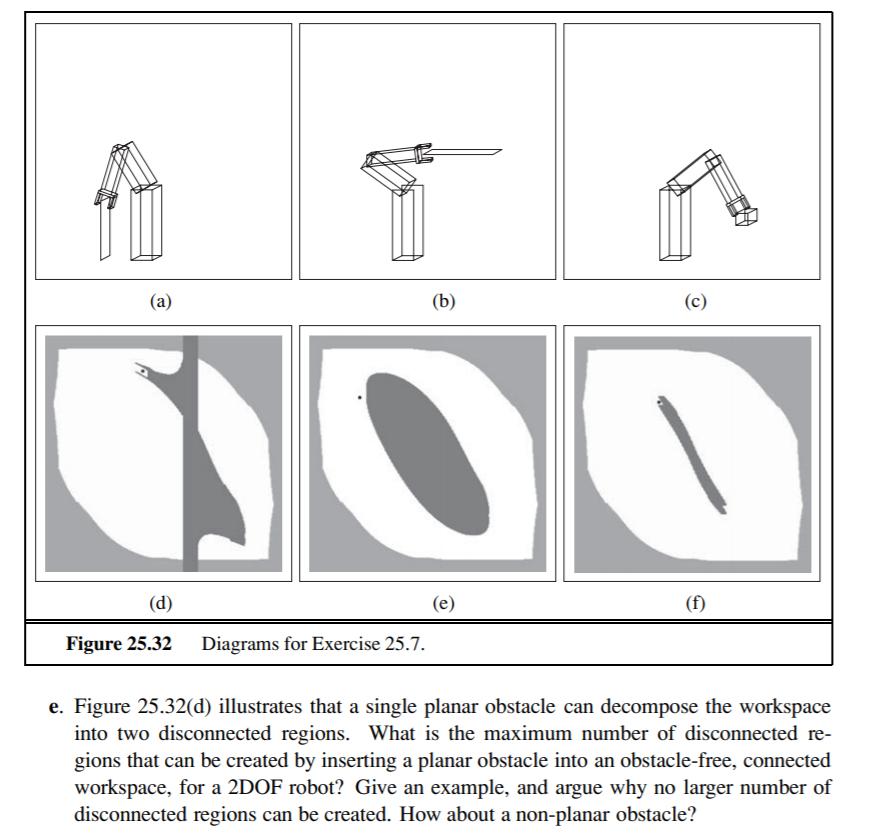
Our goal is for the robotic arm (Fig 25.32 )o start in Position (a) and reach position (c) for Picking an object – say a red Cube. Identify 5 algorithms/methods to accomplish the needed operations to do this: Perception, Planning to Move and Moving. Describe each of them in sufficient detail (1-2 small paragraphs, diagrams to explain).
Expert Answer:
Perception The first step is for the robotic arm to perceive its environment and identify the object it needs to pick up This can be done using a variety of sensors such as cameras lidar and force sen... View the full answer

Related Book For 

Posted Date:
