

Question: Perform the forward kinematics on the robot. Write down all your work. for the matrix mutiplications, By hand, calculate T 3 _ 0 and T
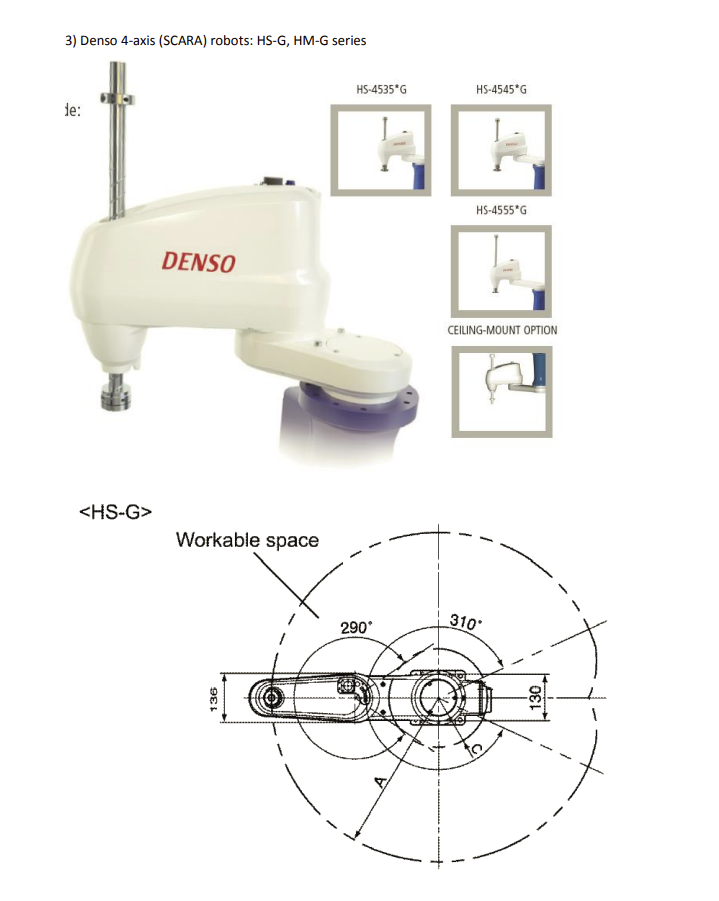
Perform the forward kinematics on the robot. Write down all your work. for the matrix mutiplications, By hand, calculate T and T Denso axis SCARA robots: HSG HMG series
DENSO
CEILINGMOUNT OPTION begintabularccccc
hline multicolumnl & HS mathrmG & HS & HmathrmG
hline multicolumnlNumber of axas & multicolumnc
hline multicolumnlMaximum arm reach mm & & &
hline multicolumnlFirstarm reach mm & & &
hline multicolumnlSecondarm reach mm & multicolumnc
hline multirowRange of mation & & multicolumncpm
hline & & multicolumncpm
hline & mathrm~mm & multicolumnc
hline & T & multicolumncpm
hline multicolumnlPositian detection & multicolumncAbsolute encoder
hline multicolumnlMinimum motion area m & & &
hline multicolumnlMaximum payjoad kg & multicolumnc
hline multicolumnlWeight approx. kgi & multicolumnc
hline multicolumnlFooprint mm & multicolumnctimes
hline multicolumnlCycle time sec & multicolumncwith kg weight
hline multicolumnlMaximum composite speed mmsec & & &
hline multirowMaximum joint speed & ec & & multicolumnc
hline & sec & multicolumnc
hline & mmsec & multicolumnc
hline & T & multicolumnc
hline multirowRepeatability & m mathrm~m & & multicolumnc
hline & mathrm~mm & multicolumncpm
hline & & multicolumncpm
hline multicolumnlMaximum force fiti sec or less, Ni & multicolumnc
hline multicolumnlMaximum allowable moment of inertia kgm & multicolumncwith kg weight
hline multicolumnlWring inarm integrated & multicolumnc lines max A per line
hline multicolumnlAit piping inarm integrated & multicolumnc ystems times times
hline multicolumnlProtection class & multicolumnlbegintabularl
Standart P
Options: P IPdust and mistsroof deanroom dass mu mathrm~m
endtabular
hline multicolumnlCeilingmount & & checkmark & checkmark
hline multicolumnlUL spedifications & multicolumnccheckmark
hline
endtabular
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock