

Question: Planning - artificial intelligence A robot ROBOT operates in an environment made of two rooms R1 and R2 connected by a door D. A box
Planning - artificial intelligence
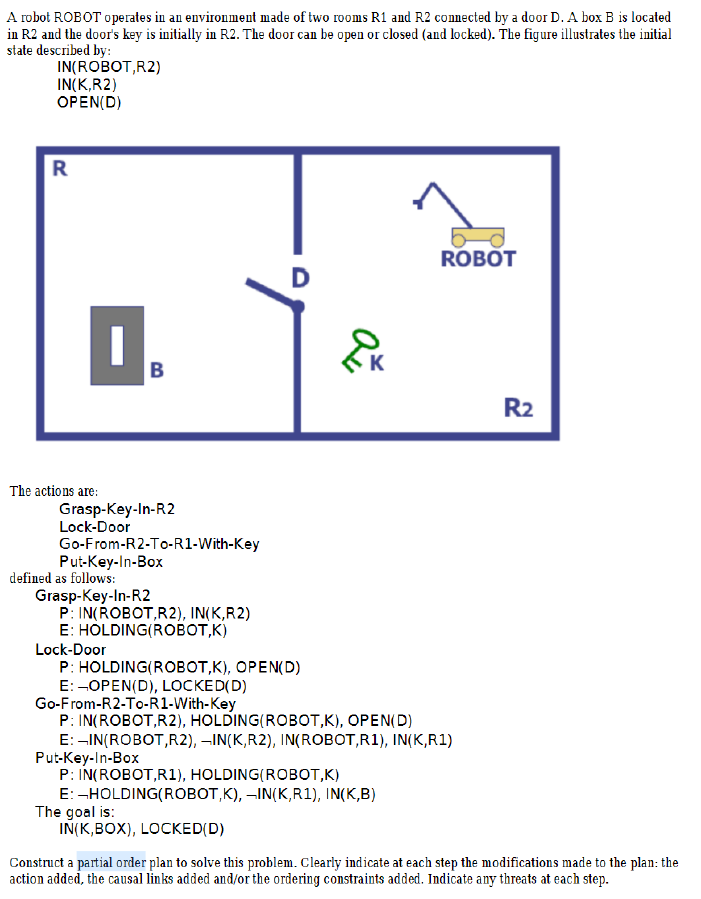
A robot ROBOT operates in an environment made of two rooms R1 and R2 connected by a door D. A box B is located in R2 and the door's key is initially in R2. The door can be open or closed (and locked). The figure illustrates the initial state described by IN(ROBOT,R2) IN(K,R2) OPEN(D) ROBOT R2 The actions are Grasp-Key-In-R2 Lock-Door Go-From-R2-To-R1-With-Key Put-Key-ln-Box defined as follows Grasp-Key-In-R2 P: IN(ROBOT,R2), IN(K,R2) E: HOLDING(ROBOT,K) Lock-Door P: HOLDING(ROBOT,K), OPEN(D) E:?OPEN(D), LOCKED(D) Go-From-R2-To-R1-With-Key P: IN(ROBOT,R2), HOLDING(ROBOT,K), OPEN(D) E:?IN(ROBOT,R2),-IN(K,R2), IN( ROBOT RI), INK,R1) Put-Key-In-Box P: IN(ROBOT,R1), HOLDING(ROBOT,K) E:-HOLDING(ROBOT,K), -IN(K,R1), IN(K,B) The goal is IN(K,BOX), LOCKEDD) Construct a partial order plan to solve this problem. Clearly indicate at each step the modifications made to the plan: the action added, the causal links added and/or the ordering constraints added. Indicate any threats at each step. A robot ROBOT operates in an environment made of two rooms R1 and R2 connected by a door D. A box B is located in R2 and the door's key is initially in R2. The door can be open or closed (and locked). The figure illustrates the initial state described by IN(ROBOT,R2) IN(K,R2) OPEN(D) ROBOT R2 The actions are Grasp-Key-In-R2 Lock-Door Go-From-R2-To-R1-With-Key Put-Key-ln-Box defined as follows Grasp-Key-In-R2 P: IN(ROBOT,R2), IN(K,R2) E: HOLDING(ROBOT,K) Lock-Door P: HOLDING(ROBOT,K), OPEN(D) E:?OPEN(D), LOCKED(D) Go-From-R2-To-R1-With-Key P: IN(ROBOT,R2), HOLDING(ROBOT,K), OPEN(D) E:?IN(ROBOT,R2),-IN(K,R2), IN( ROBOT RI), INK,R1) Put-Key-In-Box P: IN(ROBOT,R1), HOLDING(ROBOT,K) E:-HOLDING(ROBOT,K), -IN(K,R1), IN(K,B) The goal is IN(K,BOX), LOCKEDD) Construct a partial order plan to solve this problem. Clearly indicate at each step the modifications made to the plan: the action added, the causal links added and/or the ordering constraints added. Indicate any threats at each step
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts