

Question: please do task 3 and 4 using python the figure below, B is a rigid cube whose sides are of length l.A,C, and D are
please do task 3 and 4 using python
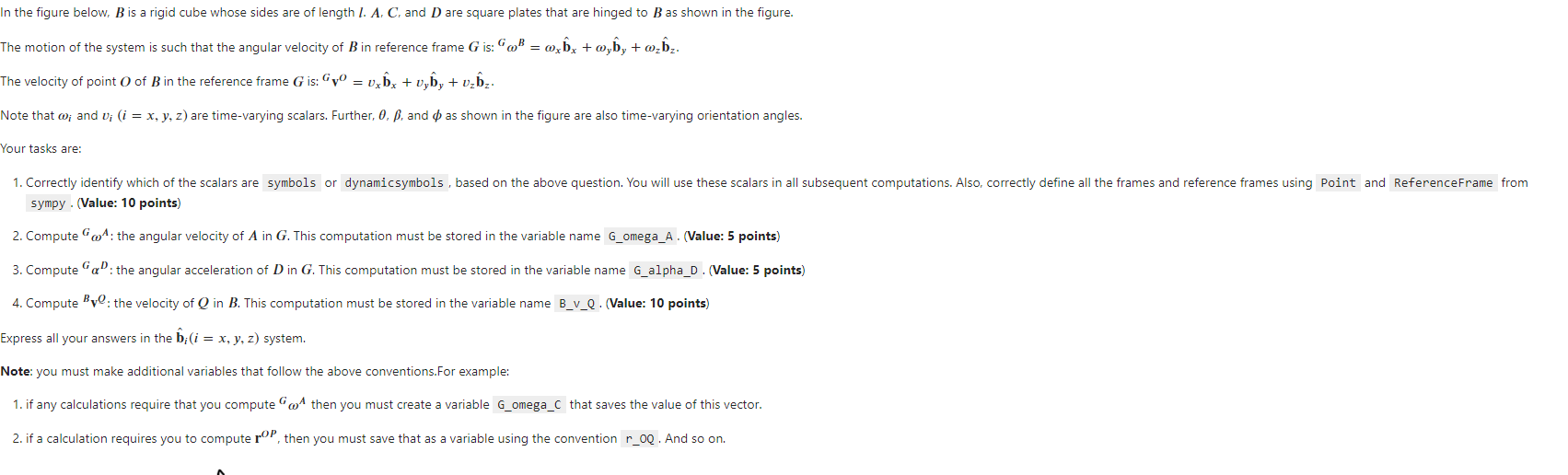
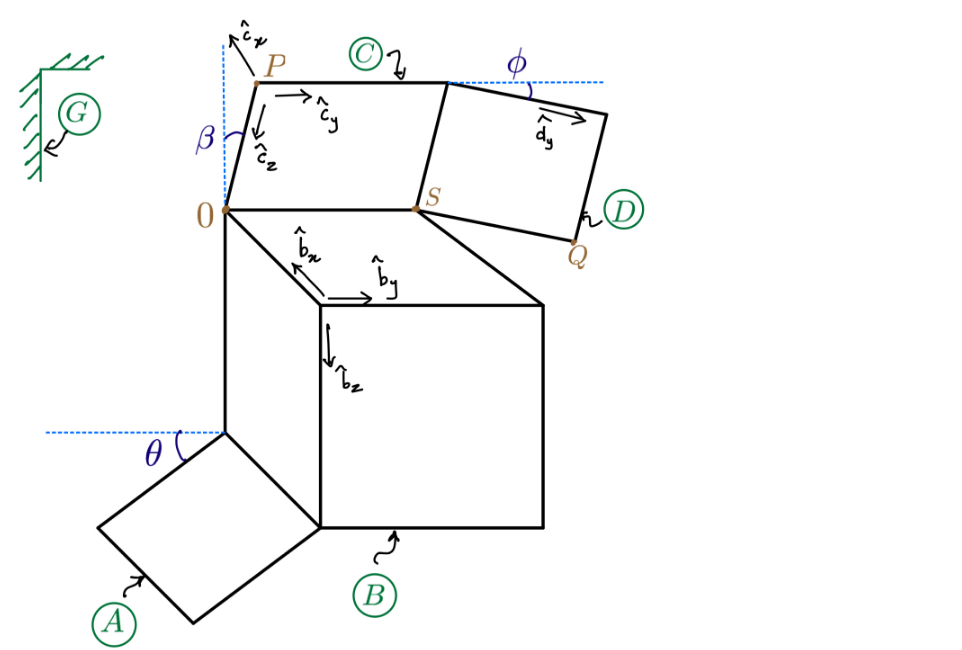
the figure below, B is a rigid cube whose sides are of length l.A,C, and D are square plates that are hinged to B as shown in the figure. he motion of the system is such that the angular velocity of B in reference frame G is: GB=xb^x+yb^y+zb^z. he velocity of point O of B in the reference frame G is: GvO=vxb^x+vyb^y+vzb^z. Jote that i and vi(i=x,y,z) are time-varying scalars. Further, ,, and as shown in the figure are also time-varying orientation angles. four tasks are: sympy . (Value: 10 points) 2. Compute GA : the angular velocity of A in G. This computation must be stored in the variable name G_omega_A . (Value: 5 points) 3. Compute GD : the angular acceleration of D in G. This computation must be stored in the variable name G_alpha_D . (Value: 5 points) 4. Compute BvQ : the velocity of Q in B. This computation must be stored in the variable name B_v_Q . (Value: 10 points) xpress all your answers in the b^i(i=x,y,z) system. Note: you must make additional variables that follow the above conventions.For example: 1. if any calculations require that you compute GA then you must create a variable G_omega_C that saves the value of this vector. 2. if a calculation requires you to compute rOP, then you must save that as a variable using the convention rOQ. And so on. the figure below, B is a rigid cube whose sides are of length l.A,C, and D are square plates that are hinged to B as shown in the figure. he motion of the system is such that the angular velocity of B in reference frame G is: GB=xb^x+yb^y+zb^z. he velocity of point O of B in the reference frame G is: GvO=vxb^x+vyb^y+vzb^z. Jote that i and vi(i=x,y,z) are time-varying scalars. Further, ,, and as shown in the figure are also time-varying orientation angles. four tasks are: sympy . (Value: 10 points) 2. Compute GA : the angular velocity of A in G. This computation must be stored in the variable name G_omega_A . (Value: 5 points) 3. Compute GD : the angular acceleration of D in G. This computation must be stored in the variable name G_alpha_D . (Value: 5 points) 4. Compute BvQ : the velocity of Q in B. This computation must be stored in the variable name B_v_Q . (Value: 10 points) xpress all your answers in the b^i(i=x,y,z) system. Note: you must make additional variables that follow the above conventions.For example: 1. if any calculations require that you compute GA then you must create a variable G_omega_C that saves the value of this vector. 2. if a calculation requires you to compute rOP, then you must save that as a variable using the convention rOQ. And so on
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts