

Question: Please explain Simulink code 2. Consider the with the following transfer functions. U(s)Y(s)=20s+10.5e4sD(s)Y(s)=20s+10.5e4s a. Set disturbance to 0 . Simulate the response Y(t) to a
Please explain Simulink code
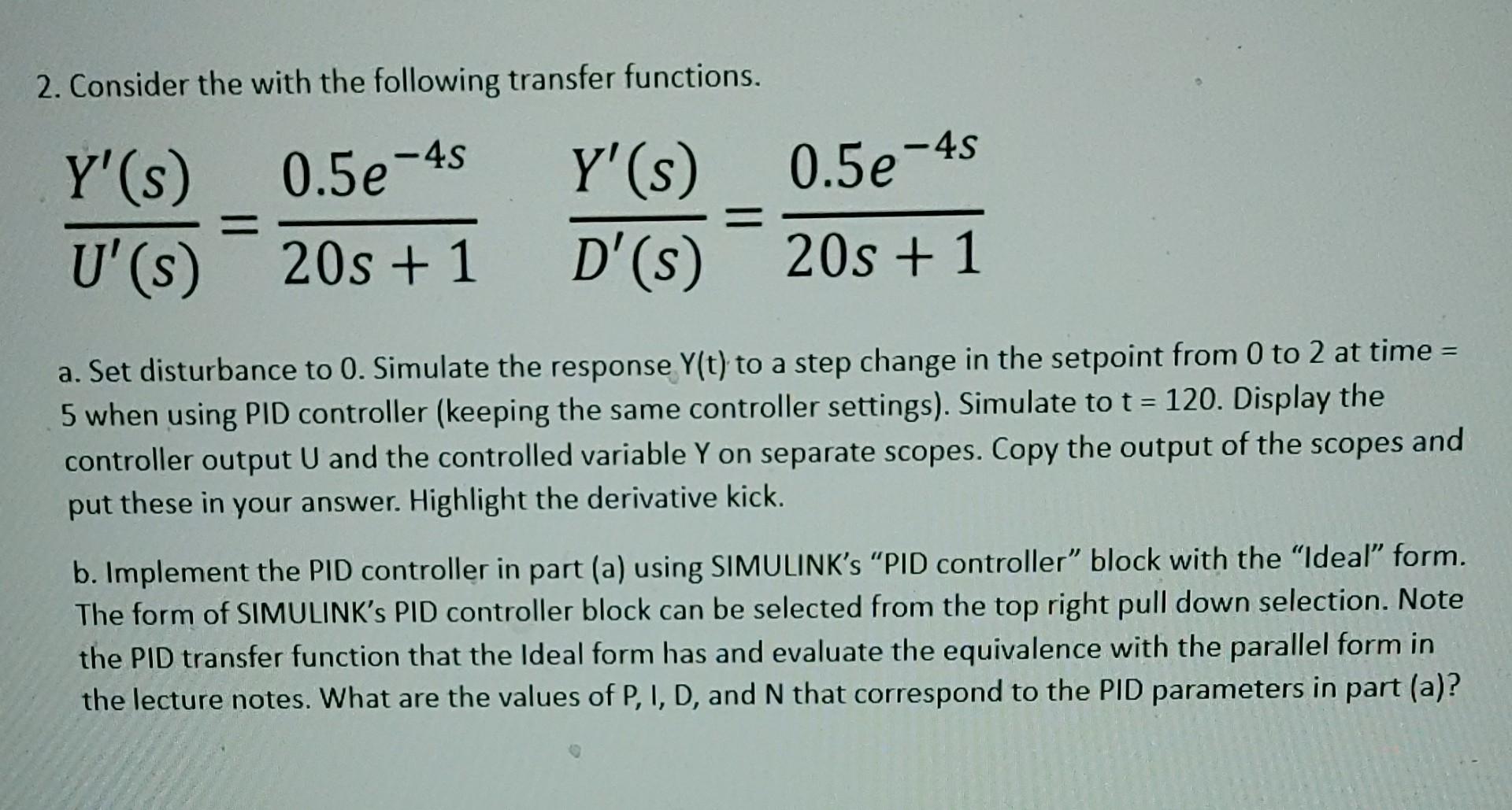
2. Consider the with the following transfer functions. U(s)Y(s)=20s+10.5e4sD(s)Y(s)=20s+10.5e4s a. Set disturbance to 0 . Simulate the response Y(t) to a step change in the setpoint from 0 to 2 at time= 5 when using PID controller (keeping the same controller settings). Simulate to t=120. Display the controller output U and the controlled variable Y on separate scopes. Copy the output of the scopes and put these in your answer. Highlight the derivative kick. b. Implement the PID controller in part (a) using SIMULINK's "PID controller" block with the "Ideal" form. The form of SIMULINK's PID controller block can be selected from the top right pull down selection. Note the PID transfer function that the Ideal form has and evaluate the equivalence with the parallel form in the lecture notes. What are the values of P,I,D, and N that correspond to the PID parameters in part (a)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts