

Question: please solve part B only on page Consider a point mass object moving on a line and described by Newton's equation of motion TO 1]
please solve part B only on page
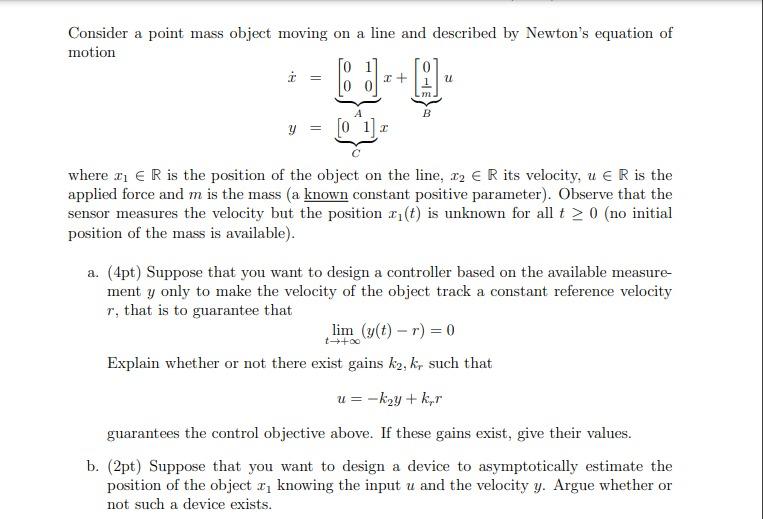
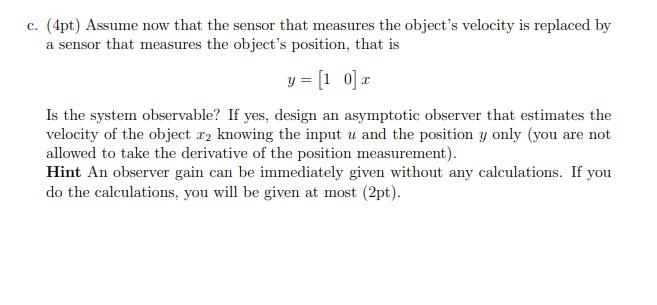
Consider a point mass object moving on a line and described by Newton's equation of motion TO 1] i = + 0 0 . u . B y O 1.2 where 11 e R is the position of the object on the line, 12 R its velocity, u R is the applied force and m is the mass (a known constant positive parameter). Observe that the sensor measures the velocity but the position r(t) is unknown for all t > 0 (no initial position of the mass is available). a. (4pt) Suppose that you want to design a controller based on the available measure ment y only to make the velocity of the object track a constant reference velocity r, that is to guarantee that lim (y(t) - r) = 0 Explain whether or not there exist gains ky, kr such that u= -k2y+kr guarantees the control objective above. If these gains exist, give their values. b. (2pt) Suppose that you want to design a device to asymptotically estimate the position of the object x, knowing the input u and the velocity y. Argue whether or not such a device exists. c. (4pt) Assume now that the sensor that measures the object's velocity is replaced by a sensor that measures the object's position, that is y = [1 0. Is the system observable? If yes, design an asymptotic observer that estimates the velocity of the object I, knowing the input u and the position y only (you are not allowed to take the derivative of the position measurement). Hint An observer gain can be immediately given without any calculations. If you do the calculations, you will be given at most (2pt). Consider a point mass object moving on a line and described by Newton's equation of motion TO 1] i = + 0 0 . u . B y O 1.2 where 11 e R is the position of the object on the line, 12 R its velocity, u R is the applied force and m is the mass (a known constant positive parameter). Observe that the sensor measures the velocity but the position r(t) is unknown for all t > 0 (no initial position of the mass is available). a. (4pt) Suppose that you want to design a controller based on the available measure ment y only to make the velocity of the object track a constant reference velocity r, that is to guarantee that lim (y(t) - r) = 0 Explain whether or not there exist gains ky, kr such that u= -k2y+kr guarantees the control objective above. If these gains exist, give their values. b. (2pt) Suppose that you want to design a device to asymptotically estimate the position of the object x, knowing the input u and the velocity y. Argue whether or not such a device exists. c. (4pt) Assume now that the sensor that measures the object's velocity is replaced by a sensor that measures the object's position, that is y = [1 0. Is the system observable? If yes, design an asymptotic observer that estimates the velocity of the object I, knowing the input u and the position y only (you are not allowed to take the derivative of the position measurement). Hint An observer gain can be immediately given without any calculations. If you do the calculations, you will be given at most (2pt)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts