

Question: pleaze give a simulation and disigen by matlab program ! secreeen MTALAB Assignment: The followaing system represent an Unmanned Free-Swimming Subencrsible Vehicle (UFSS). The depth
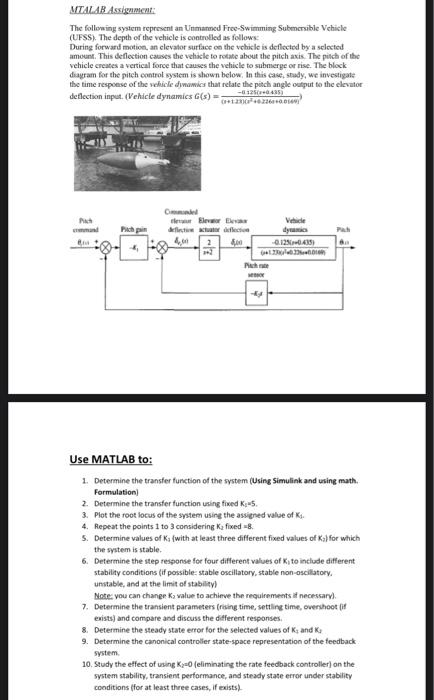
MTALAB Assignment: The followaing system represent an Unmanned Free-Swimming Subencrsible Vehicle (UFSS). The depth of the vehicle is controlled as follows: During forward motion, an elevalor surface co the vehicle is deflected by a selected amount. This deflection eavass the vehicle to retate about the pitch axis. The pilch of the vehicle creates a vertical force that causes the vehicle to submerge or rise. The block diayram for the pitch control system is shown below, In this ease, snady, we investigate the time respoesse of the weluicle dinawics that relate the pitch angle output to the elevitor deflection input. (Vehicle dynamics G(s)=(0+123)(x2+4236+0.069)6135(r+0.435) ) Use MATLAB to: 1. Determine the transfer function of the system (Using Simulink and using math. Formulation] 2. Determine the transfer function using fixed K4w5. 3. Plot the root locus of the system using the assigned value of K3. 4. Repeat the points 1 to 3 considering K2 fixed =8. 5. Determine values of K3 (with at least three different fixed values of K3 ) for which the system is stable. 6. Determine the step response for four different values of X1 to include different stability conditions (if possible: stable oscillatory, stable non-oscillatory. unstable, and at the limit of stabilisy) Note: you can change K2 value to achieve the reguinements it necessary). 7. Determine the transient parameters (fiding time, settling time, overhoot fif exists) and compare and discuss the different responses. 8. Determine the steady state error for the selected values of K4 and K4 9. Determine the canonical controller state-space representation of the feedback system. 10. Study the effect of using K2=0 (eliminating the rate feedback controller) on the system stability, transient performance, and steady state error under stability conditions (for at least three cases, if exists)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts