

Question: Problem 1 n, 92 n B 94 P LA Figure 1. A five bar robotic rat exoskeleton (D) Figure 1 shows a diagram of
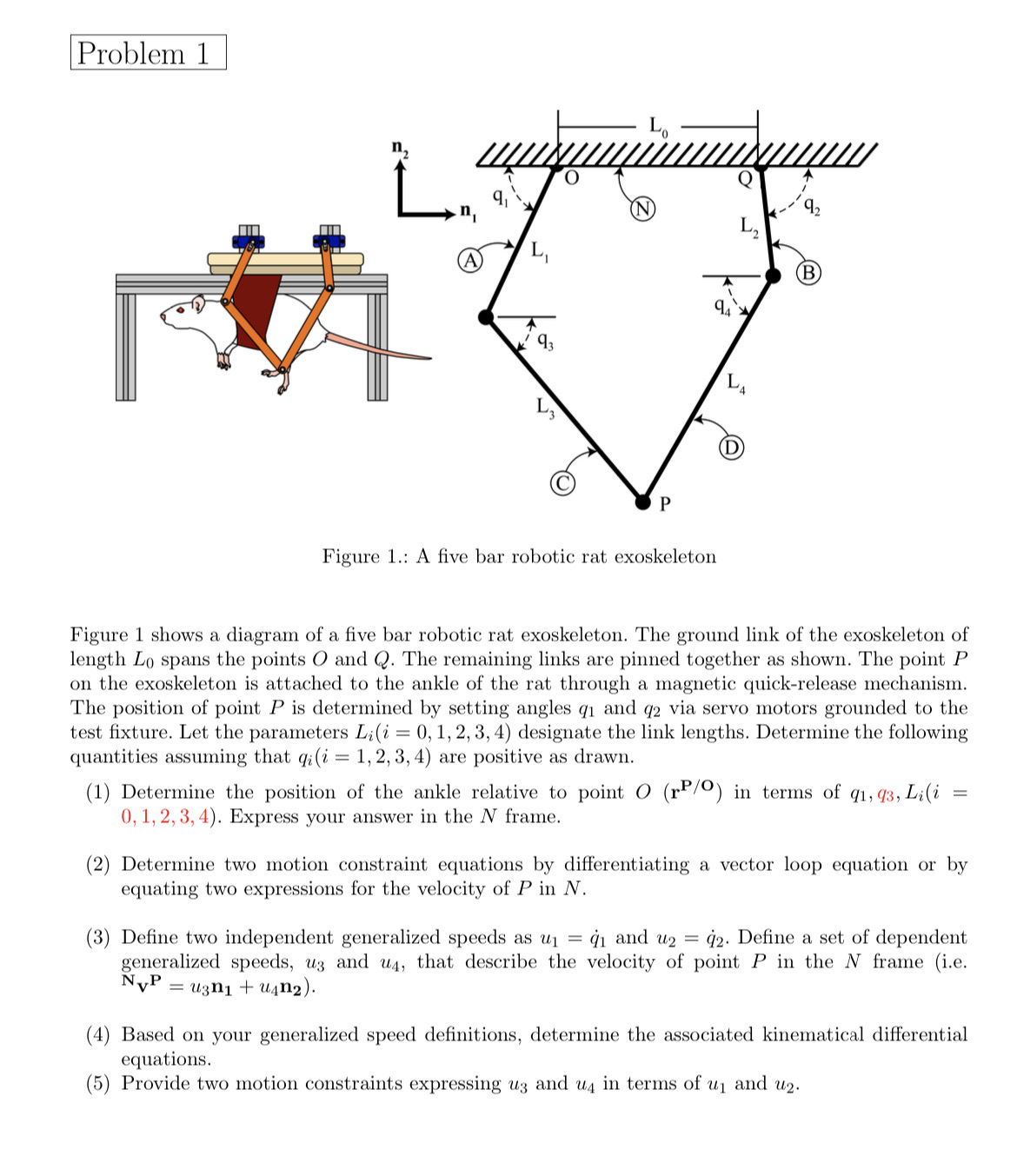
Problem 1 n, 92 n B 94 P LA Figure 1. A five bar robotic rat exoskeleton (D) Figure 1 shows a diagram of a five bar robotic rat exoskeleton. The ground link of the exoskeleton of length Lo spans the points O and Q. The remaining links are pinned together as shown. The point P on the exoskeleton is attached to the ankle of the rat through a magnetic quick-release mechanism. The position of point P is determined by setting angles q and 92 via servo motors grounded to the test fixture. Let the parameters Li(i = 0, 1, 2, 3, 4) designate the link lengths. Determine the following quantities assuming that qi(i = 1, 2, 3, 4) are positive as drawn. (1) Determine the position of the ankle relative to point 0 (rP/O) in terms of 91, 93, Li(i 0, 1, 2, 3, 4). Express your answer in the N frame. (2) Determine two motion constraint equations by differentiating a vector loop equation or by equating two expressions for the velocity of P in N. (3) Define two independent generalized speeds as u = q and u = 92. Define a set of dependent generalized speeds, u3 and 4, that describe the velocity of point P in the N frame (i.e. NvP = un1 +u4n2). (4) Based on your generalized speed definitions, determine the associated kinematical differential equations. (5) Provide two motion constraints expressing u3 and 4 in terms of u and u2.
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts