

Question: Problem 1 Robotic manipulators are found throughout manufacturing and assembly plants. A simple robotic manipulator is a 2-dimensional revolute-revolute joint manipulator with an end-effector,
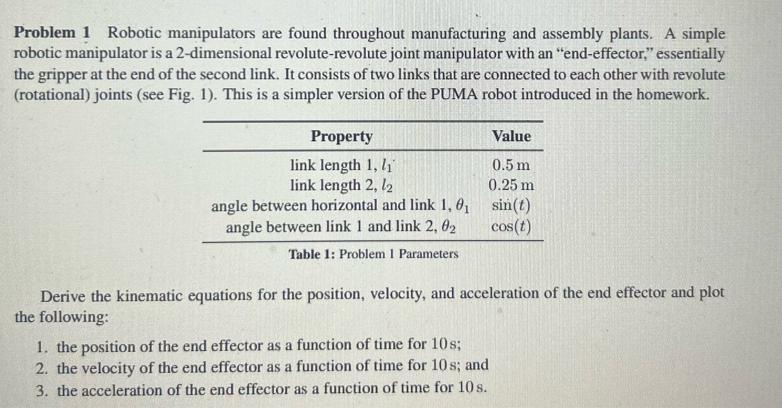
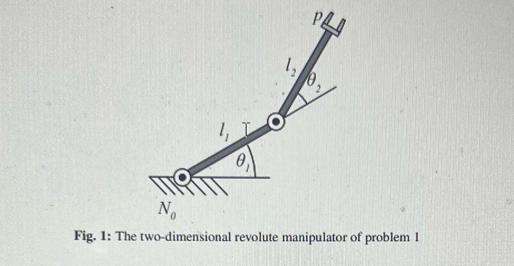
Problem 1 Robotic manipulators are found throughout manufacturing and assembly plants. A simple robotic manipulator is a 2-dimensional revolute-revolute joint manipulator with an "end-effector," essentially the gripper at the end of the second link. It consists of two links that are connected to each other with revolute (rotational) joints (see Fig. 1). This is a simpler version of the PUMA robot introduced in the homework. Property link length 1, 1 link length 2, 12 angle between horizontal and link 1,0 angle between link 1 and link 2,02 Table 1: Problem 1 Parameters Value 0.5 m 0.25 m sin(t) cos(t) Derive the kinematic equations for the position, velocity, and acceleration of the end effector and plot the following: 1. the position of the end effector as a function of time for 10s; 2. the velocity of the end effector as a function of time for 10 s; and 3. the acceleration of the end effector as a function of time for 10 s. 0, N Fig. 1: The two-dimensional revolute manipulator of problem 1
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts