

Question: Problem 2: For the SCARA manipulator (RRP arm with one degree of freedom wrist) showin below (4 degrees of freedom) a) Identify all the joint
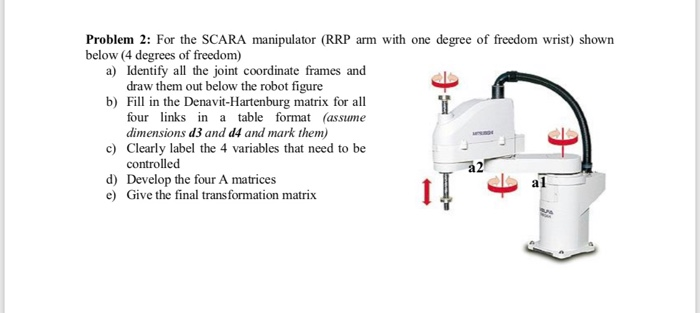
Problem 2: For the SCARA manipulator (RRP arm with one degree of freedom wrist) showin below (4 degrees of freedom) a) Identify all the joint coordinate frames and draw them out below the robot figure b) Fill in the Denavit-Hartenburg matrix for all four links in a table format (assume dimensions d3 and d4 and mark them) c) Clearly label the 4 variables that need to be d) e) controlled Develop the four A matrices Give the final transformation matrix Problem 2: For the SCARA manipulator (RRP arm with one degree of freedom wrist) showin below (4 degrees of freedom) a) Identify all the joint coordinate frames and draw them out below the robot figure b) Fill in the Denavit-Hartenburg matrix for all four links in a table format (assume dimensions d3 and d4 and mark them) c) Clearly label the 4 variables that need to be d) e) controlled Develop the four A matrices Give the final transformation matrix
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts