

Question: Problem 2 . The robotic arm NOOKLOOK is a tool that is designed to look for small metallic objects in a difficult landscape. The arm
Problem The robotic arm NOOKLOOK is a tool that is designed to look for small metallic objects in
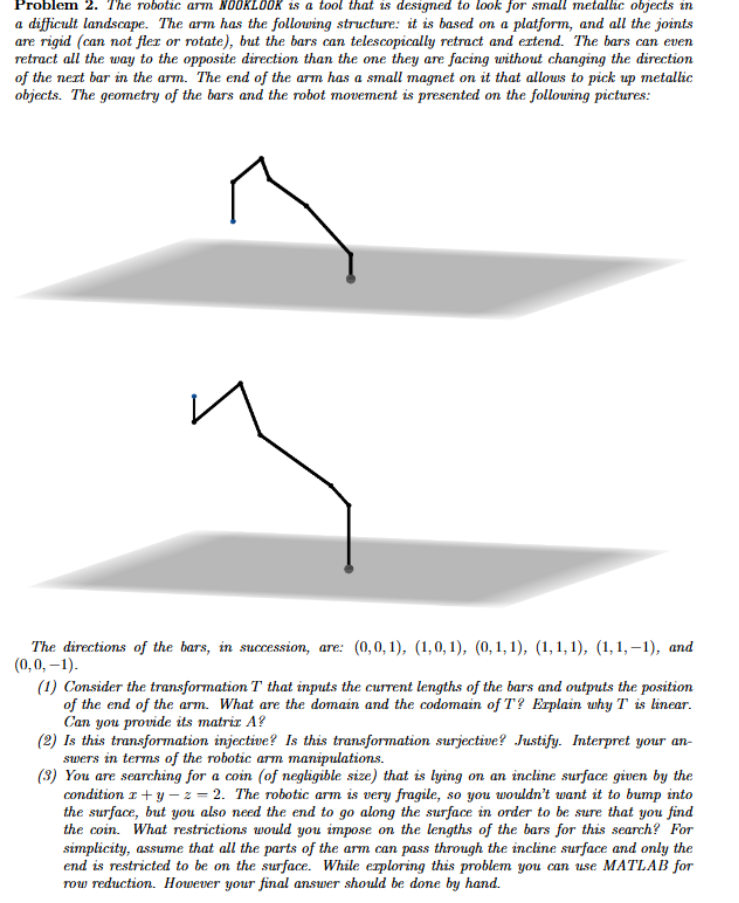
a difficult landscape. The arm has the following structure: it is based on a platform, and all the joints
are rigid can not flex or rotate but the bars can telescopically retract and extend. The bars can even
retract all the way to the opposite direction than the one they are facing without changing the direction
of the next bar in the arm. The end of the arm has a small magnet on it that allows to pick up metallic
objects. The geometry of the bars and the robot movement is presented on the following pictures:
The directions of the bars, in succession, are: and
Consider the transformation T that inputs the current lengths of the bars and outputs the position
of the end of the arm. What are the domain and the codomain of T Explain why T is linear.
Can you provide its matrix A
Is this transformation injective? Is this transformation surjective? Justify. Interpret your an
swers in terms of the robotic arm manipulations.
You are searching for a coin of negligible size that is lying on an incline surface given by the
condition xyz The robotic arm is very fragile, so you wouldn't want it to bump into
the surface, but you also need the end to go along the surface in order to be sure that you find
the coin. What restrictions would you impose on the lengths of the bars for this search? For
simplicity, assume that all the parts of the arm can pass through the incline surface and only the
end is restricted to be on the surface. While exploring this problem you can use MATLAB for now reduction. However your final answer should be done by hand.
Consider the set of all admissible for the previous question lengths of the bars as a subset in
the set R of all possible bar lengths. Does it form a subspace?
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock