

Question: Q2: Given the 3-link manipulator as shown below, answer the following questions: 1. Find the end-effector position as a function of joint angles. 2.
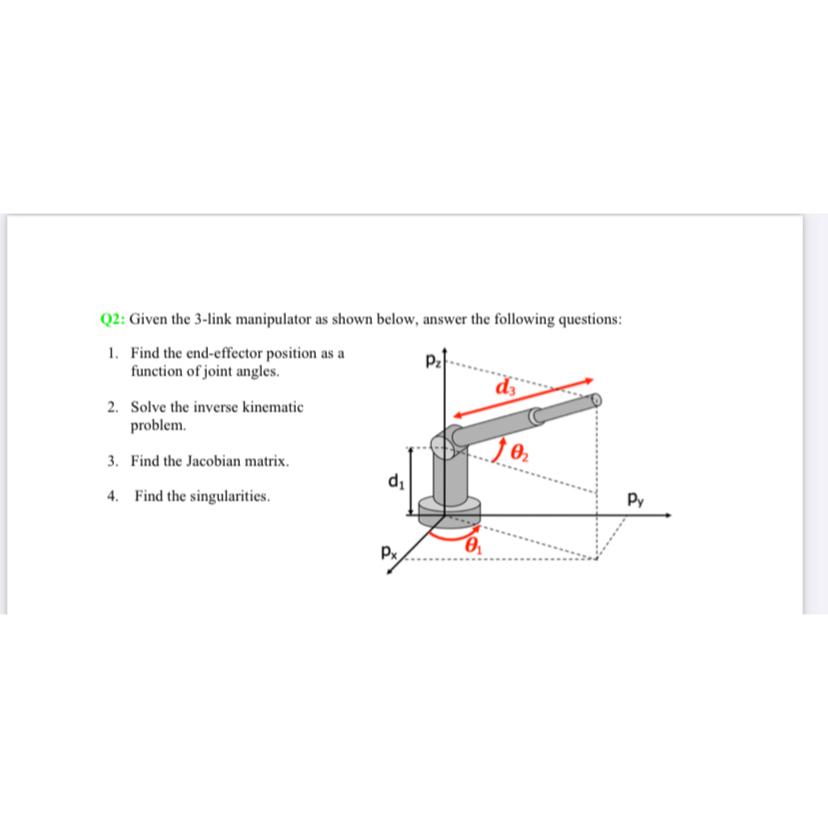
Q2: Given the 3-link manipulator as shown below, answer the following questions: 1. Find the end-effector position as a function of joint angles. 2. Solve the inverse kinematic problem. 3. Find the Jacobian matrix. 4. Find the singularities. ) 02 d Py Px
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock