

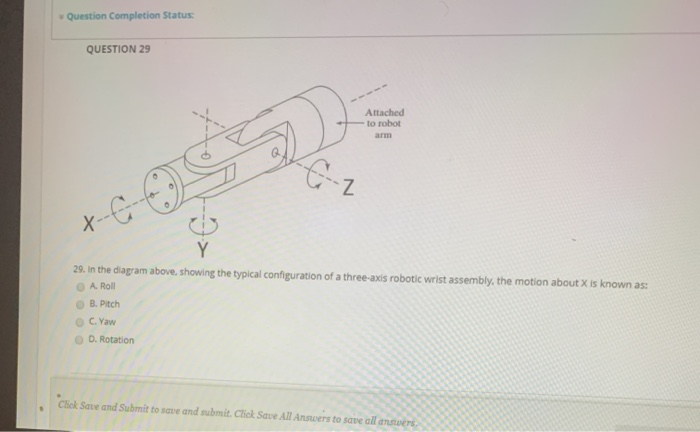
Question: Question Completion Status: QUESTION 29 Attached to robot arm Z 29. In the diagram above, showing the typical configuration of a three-axis robotic wrist assembly,
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock