

Question: Question : Subject : Mobile robots using (Pioneer_p3dx robot) with python and VREP simulation. The Environment: The robots initial position should be any random place
Question : Subject : Mobile robots using (Pioneer_p3dx robot) with python and VREP simulation.
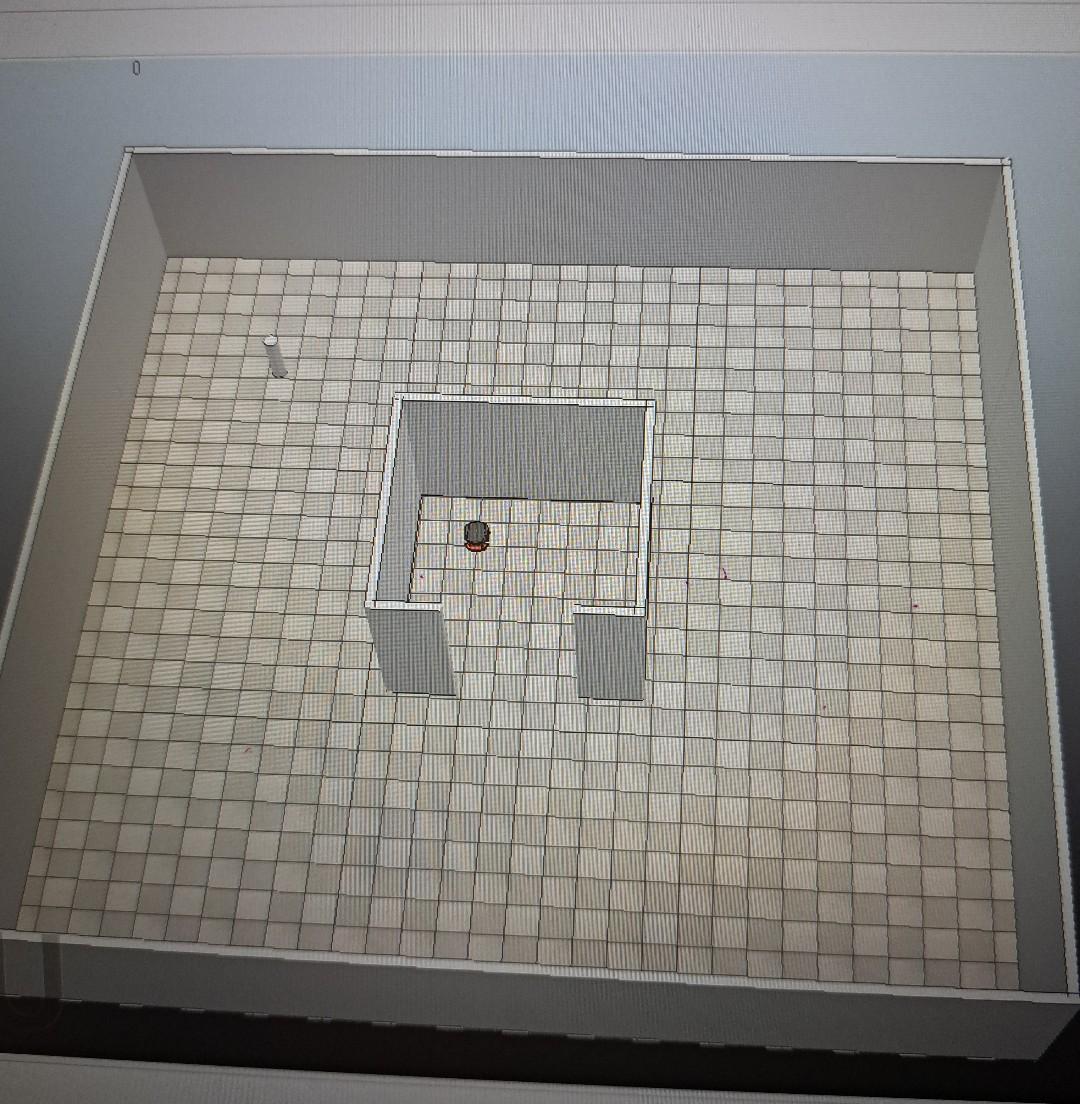
The Environment:
The robots initial position should be any random place inside the room in the middle of the map. The map is formed of boundary walls and a room in the center of the map with a doorway.
The robot starts in a random position and heads into the room.
The outside room is currently empty, however, you should place objects randomly yourself into this space, and the robot must avoid these.
The beacon should be placed inside this environment.
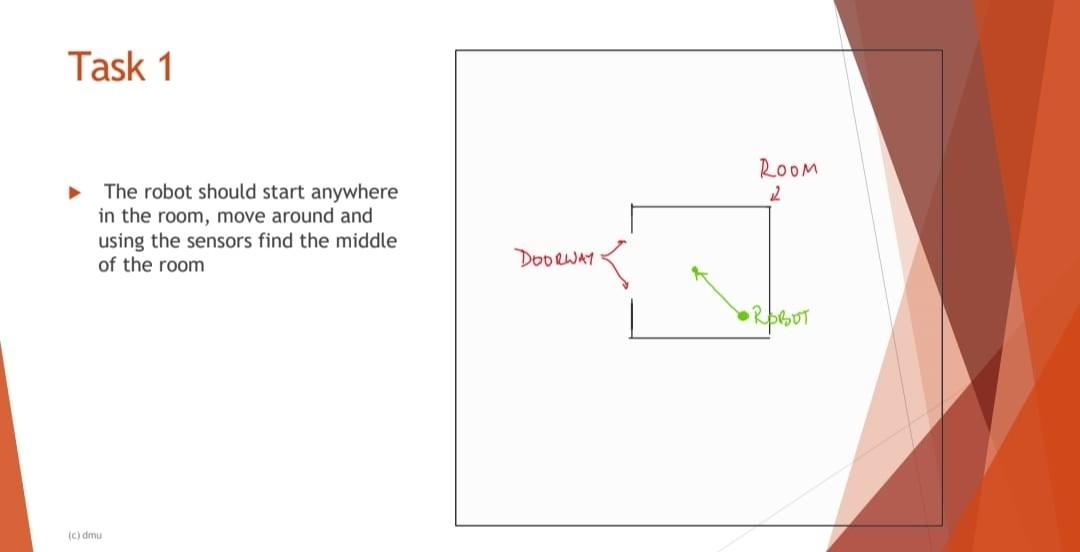
Task 1:
The robot should start anywhere in the room, move around, and use the sensors to find the middle of the room.
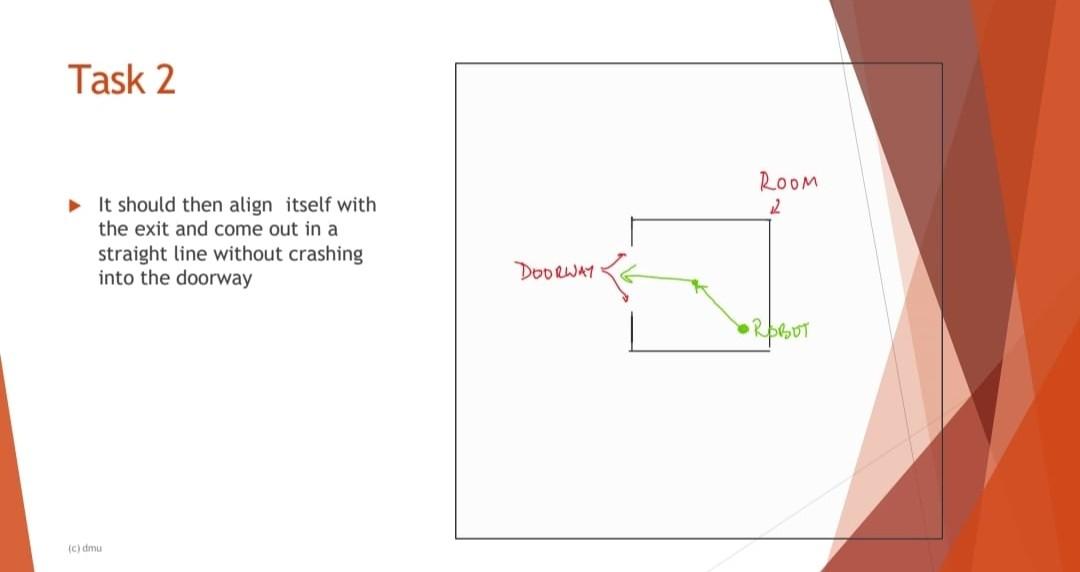
Task 2:
It should then align itself with the exit and come out in a straight line without crashing into the doorway.
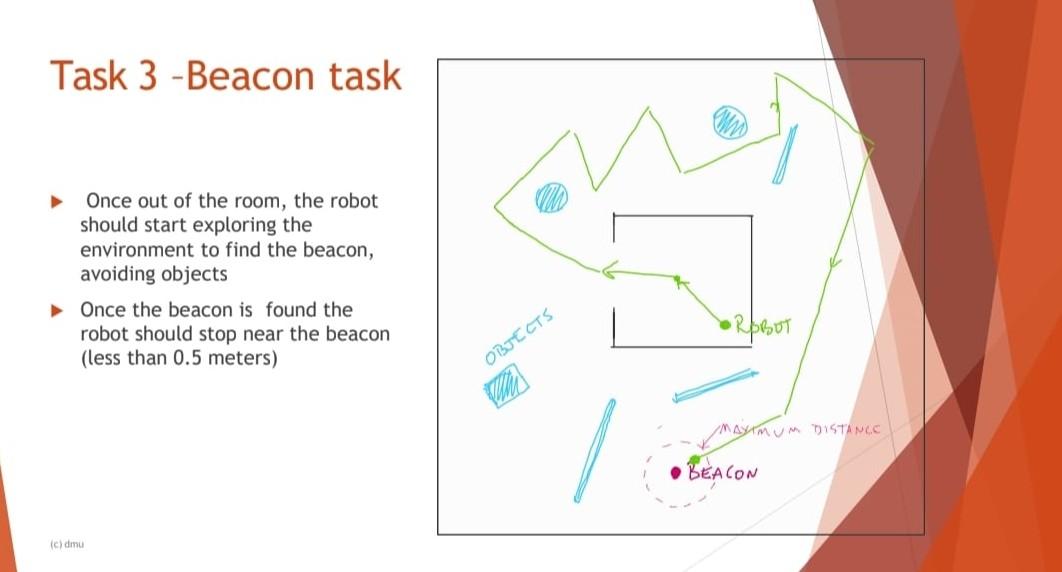
Task 3 Beacon task:
Once out of the room, the robot should start exploring the environment to find the beacon, avoiding objects Once the beacon is found the robot should stop near the beacon (less than 0.5 meters)
Task 3 Mapping Tasks:
Instead of finding the beacon, you should map the environment completely and accurately.
You may experiment with methods to reduce the amount of data in the mapping (such as RANSAC, creating line segments, etc).
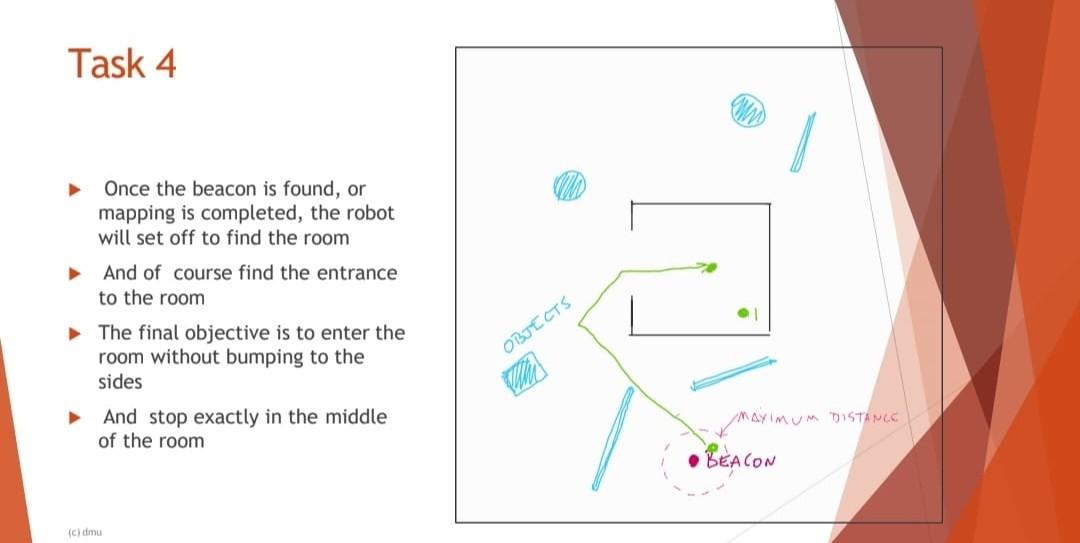
Task 4:
Once the beacon is found, or mapping is c
ompleted, the robot will set off to find the room. And of course, find the entrance to the room. The final objective is to enter the room without bumping to the sides. And stop exactly in the middle of the room.
Task 5:
During all the tasks, the robot should attempt to map the environment using data from the sensors. The scattergram data may be saved when the robot has completed the tasks, then shown in Excel, Matlab, Python, or any other method afterward. You may also want to show the data live as the robot completes its tasks.
The robot should start anywhere in the room, move around and using the sensors find the middle of the room Task 3 -Beacon task Once out of the room, the robot should start exploring the environment to find the beacon, avoiding objects Once the beacon is found the robot should stop near the beacon (less than 0.5 meters) It should then align itself with the exit and come out in a straight line without crashing into the doorway Instead of finding the beacon, you should map the environment completely and accurately. You may experiment with methods to reduce the amount of data in the mapping (such as RANSAC, creating line segments etc) Once the beacon is found, or mapping is completed, the robot will set off to find the room And of course find the entrance to the room - The final objective is to enter the room without bumping to the sides And stop exactly in the middle of the room During all the tasks, the robot should attempt to map the environment using data from the sensors. You will learn about this in Week 7 The scattergram data may be saved when the robot has completed the tasks, then shown in Excel, Matlab, Python or any other method afterwards. You may also may want to show the data live as the robot completes its tasks
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts