

Question: Shown below is a construction robot having two revolute joints and one prismatic joint. Notice that the axis of the prismatic joint has an offset
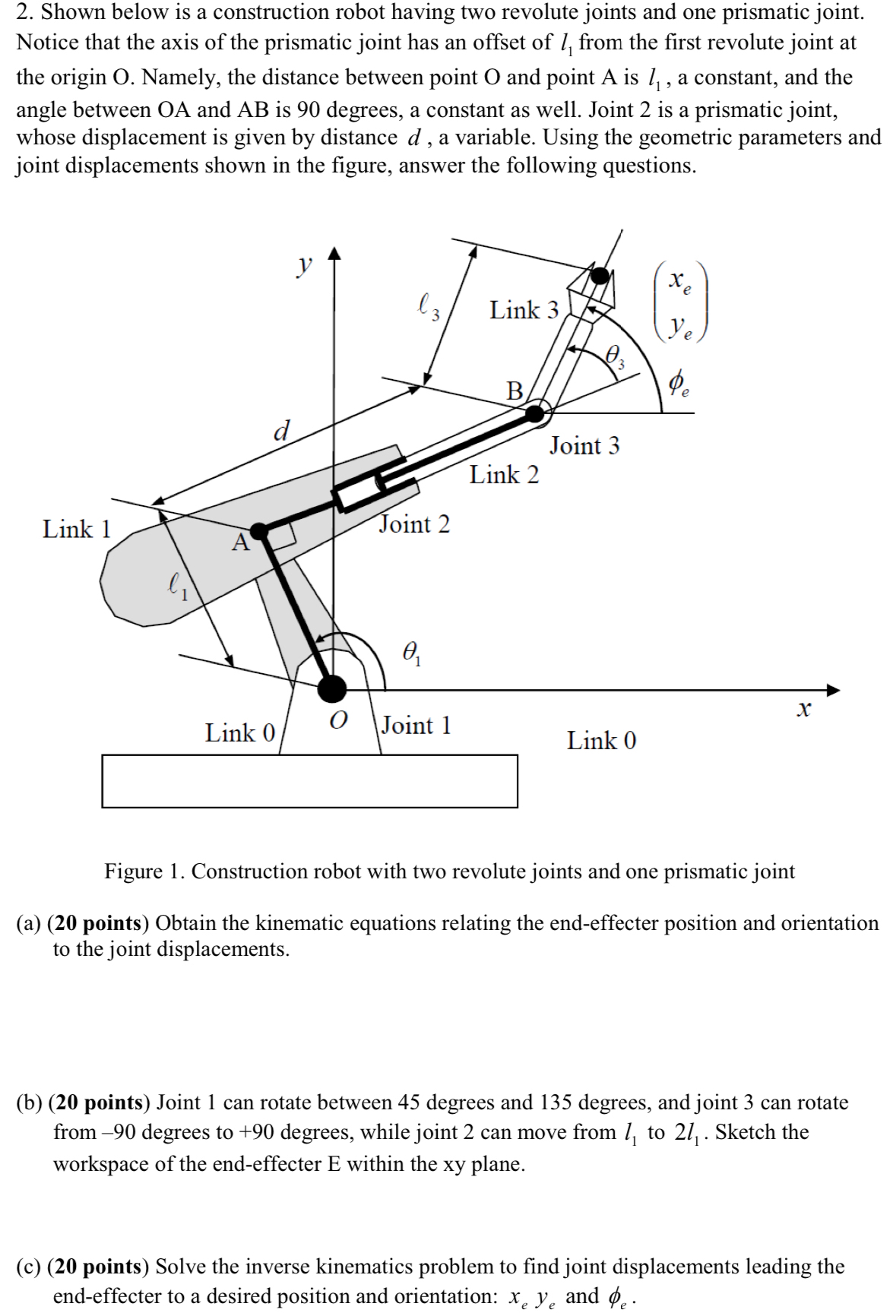
Shown below is a construction robot having two revolute joints and one prismatic joint. Notice that the axis of the prismatic joint has an offset of from the first revolute joint at the origin O Namely, the distance between point O and point A is a constant, and the angle between OA and AB is degrees, a constant as well. Joint is a prismatic joint, whose displacement is given by distance a variable. Using the geometric parameters and joint displacements shown in the figure, answer the following questions.
Figure Construction robot with two revolute joints and one prismatic joint
a points Obtain the kinematic equations relating the endeffecter position and orientation to the joint displacements.
b points Joint can rotate between degrees and degrees, and joint can rotate from degrees to degrees, while joint can move from to Sketch the workspace of the endeffecter E within the xy plane.
c points Solve the inverse kinematics problem to find joint displacements leading the endeffecter to a desired position and orientation: and
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock