

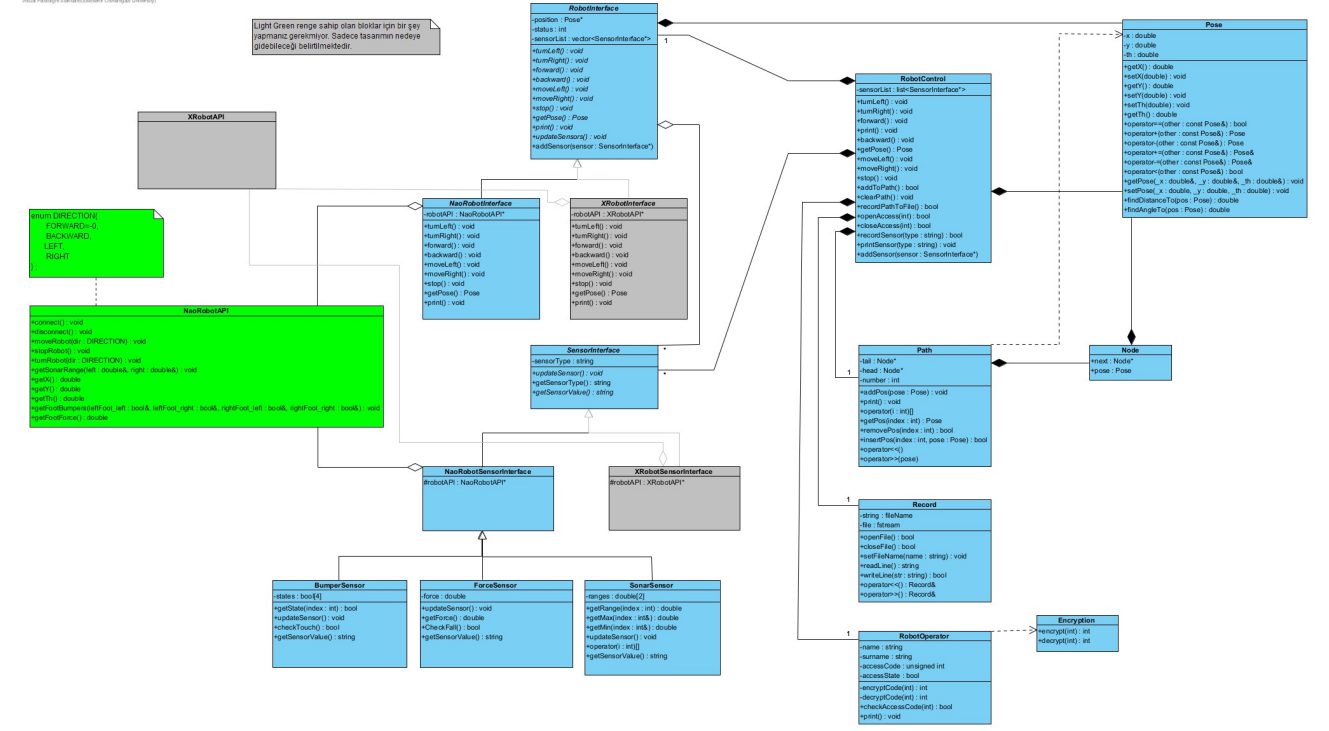
Question: SonarSensor, BumperSensor and ForceSensor classes are grouped under the NaoRobotSensorInterface class. NaoRobotSensorInterface class is also under the SensorInterface abstract class. When there are sensors defined
SonarSensor, BumperSensor and ForceSensor classes are grouped under the NaoRobotSensorInterface class. NaoRobotSensorInterface class is also under the SensorInterface abstract class. When there are sensors defined for a new robot, they will be added under SensorInterface. Two new additions to sensor classes
class has been added. These are the getSensorType and getSensorValue classes. The getSensorType function returns the sensor type as a string For example, sonarbumberforce etc. getSensorValue function returns the data of the sensor to which it belongs as a string For example, kgf for force sensor m m for sonar, etc.
Can you write SonarSensor.h and cpp codes and BumperSensor h and cpp codes according to the information above and the UML design given in the figure?
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock