

Question: system with unstable eigenvalues (poles) and move them into stable positions in the left half of the s plane using negative feedback. The diagram below
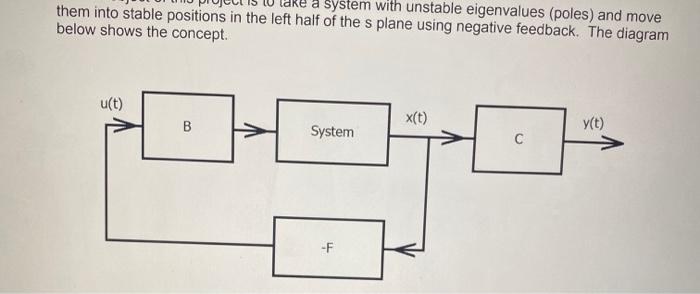


system with unstable eigenvalues (poles) and move them into stable positions in the left half of the s plane using negative feedback. The diagram below shows the concept. u(t) x(t) B System y(t) -F Given the provided system state-space system A, B, C, D 1. Convert it to the phase variable canonical form using the provided similarity transform T (similar to an identity matrix but the 1's are on the opposite diagonal). Call these new matrices A1, B1, C1, & D1. 2. Get the controllability matrix CC1 for this transformed system using the MATLAD ntr your report. 6. Find the gain vector F1 that will move the original eigenvalue locations to the following new stable positions - 1+2*),-1-2*),-5+j,-5-j, and -3. Hint: Write out the characteristic equation for the system using the given stable poles. Then add the coefficients of this polynominal to the coefficients in the last row of the system matrix A1 in phase variable canonical form to get your gain vector F1. 7. Using the MATLAB eia(A1-B1*11 command find th. system with unstable eigenvalues (poles) and move them into stable positions in the left half of the s plane using negative feedback. The diagram below shows the concept. u(t) x(t) B System y(t) -F Given the provided system state-space system A, B, C, D 1. Convert it to the phase variable canonical form using the provided similarity transform T (similar to an identity matrix but the 1's are on the opposite diagonal). Call these new matrices A1, B1, C1, & D1. 2. Get the controllability matrix CC1 for this transformed system using the MATLAD ntr your report. 6. Find the gain vector F1 that will move the original eigenvalue locations to the following new stable positions - 1+2*),-1-2*),-5+j,-5-j, and -3. Hint: Write out the characteristic equation for the system using the given stable poles. Then add the coefficients of this polynominal to the coefficients in the last row of the system matrix A1 in phase variable canonical form to get your gain vector F1. 7. Using the MATLAB eia(A1-B1*11 command find th
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts