

Question: The following is using ROS in a python environment. You will need to create a workspace that is dependent on std_msgs, rospy, message_generation and message_runtime.
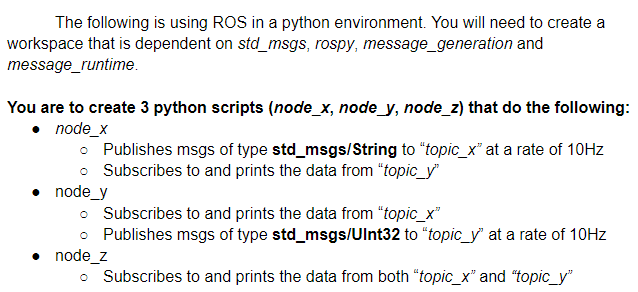
The following is using ROS in a python environment. You will need to create a workspace that is dependent on std_msgs, rospy, message_generation and message_runtime. You are to create 3 python scripts (node_x, node_y, node_z) that do the following: node_x Publishes msgs of type std_msgs/String to "topic_x at a rate of 10Hz Subscribes to and prints the data from "topic_y" node_y o Subscribes to and prints the data from "topic_x" o Publishes msgs of type std_msgs/UInt32 to "topic_y at a rate of 10Hz node_z o Subscribes to and prints the data from both "topic_x" and "topic_y
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock