

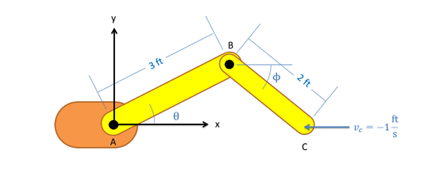
Question: The robotic arm from the previous problem is in the configuration shown below. Assume that theta is currently 3 0 degrees and that point C
The robotic arm from the previous problem is in the configuration shown below. Assume that theta is currently degrees and that point C currently lies along the x axis. If we want the end effector at C to travel fts in the negative x direction, what should the angular velocities be at joints A and B You must use a relative motion analysis, but can choose vector or scalar. Looking for answer in terms of Theta dot and Sigma dot
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock