

Question: To write MATLAB codes for the following problems, we can refer to Algorithms 5.1 and 5.2 in Chapter 5. Problem 6.6. Consider the dynamical system
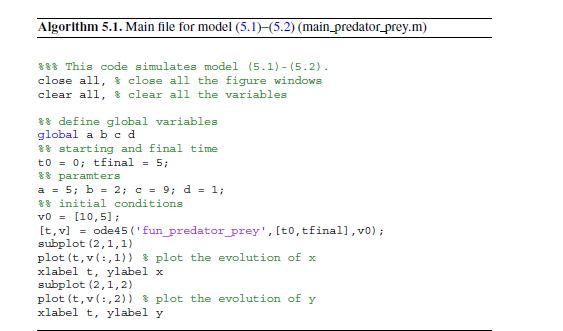
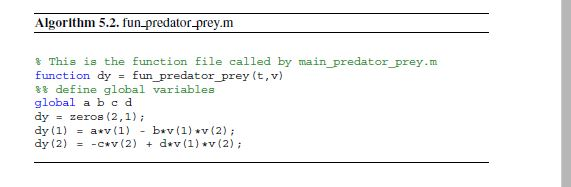
To write MATLAB codes for the following problems, we can refer to Algorithms 5.1 and 5.2 in Chapter 5. Problem 6.6. Consider the dynamical system (6.7)(6.8) with u = 1, n = 1,2, r2 = 1,4, K = 3, and x(0) = 2, y(0) = 1, so that x(t) > y(t) fort small. Simulate the system for t> 0 until you arrive at time T such that y(T) = x(T). Problem 6.10. Implement the backward Euler method for y=-y2 +t, y(0) = 1, Ostsi. Use h = 0.01, 0.005 0.001. (Hint: you have to solve a quadratic equation at each time step.] Algorithm 5.1. Main file for model (5.1) (5.2) (main_predator_prey.m) 888 This code simulates model (5.1) - (5.2). close all, close all the figure windows clear all, clear all the variables 8% define global variables global a b c d 88 starting and final time t0 = 0; tfinal = 5; 8% paramters a = 5; b = 2; c = 9; d = 1; %% initial conditions v0 = [10,5); [t, v] = ode45 ('fun_predator prey', [t0,tfinal],vo); subplot (2,1,1) plot(t,v(:,1)) $ plot the evolution of x xlabel t, ylabel x subplot (2,1,2) plot(t,v(:,2)) plot the evolution of y xlabel t, ylabel y Algorithm 5.2. fun predator prey.m $ This is the function file called by main predator prey.m function dy = fun_predator_prey (t,v) 8% define global variables global a bed dy = zeros (2,1); dy (1) = a*v (1) - buv(1) *v (2); dy (2) = -cwv(2) + dev(1) *v (2)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts