

Question: We are using Loop-Pro software for the simulations and data. Please help with all parts, Thanks! Use Custom Process: Kp=2,p=200,p=0 I. Zero dead time case:
 We are using Loop-Pro software for the simulations and data. Please help with all parts, Thanks!
We are using Loop-Pro software for the simulations and data. Please help with all parts, Thanks!
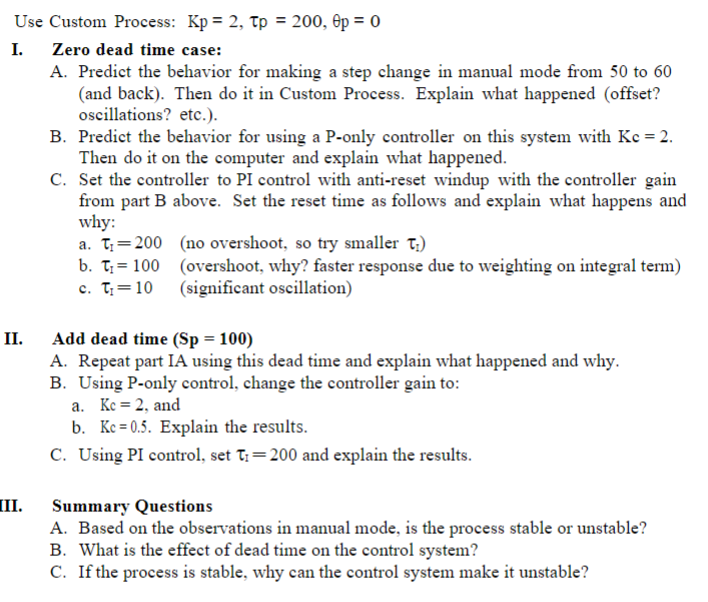
Use Custom Process: Kp=2,p=200,p=0 I. Zero dead time case: A. Predict the behavior for making a step change in manual mode from 50 to 60 (and back). Then do it in Custom Process. Explain what happened (offset? oscillations? etc.). B. Predict the behavior for using a P-only controller on this system with Kc=2. Then do it on the computer and explain what happened. C. Set the controller to PI control with anti-reset windup with the controller gain from part B above. Set the reset time as follows and explain what happens and why: a. I=200 (no overshoot, so try smaller I ) b. I=100 (overshoot, why? faster response due to weighting on integral term) c. I=10 (significant oscillation) I. Add dead time (Sp=100) A. Repeat part IA using this dead time and explain what happened and why. B. Using P-only control, change the controller gain to: a. Kc=2, and b. Kcc=0.5. Explain the results. C. Using PI control, set I=200 and explain the results. I. Summary Questions A. Based on the observations in manual mode, is the process stable or unstable? B. What is the effect of dead time on the control system? C. If the process is stable, why can the control system make it unstable
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts