

Question: WE USE System given below. D Ga Ya Y sp E U Km Y, GC G Popuko-oh G Ym Gm - 1 1 + 108
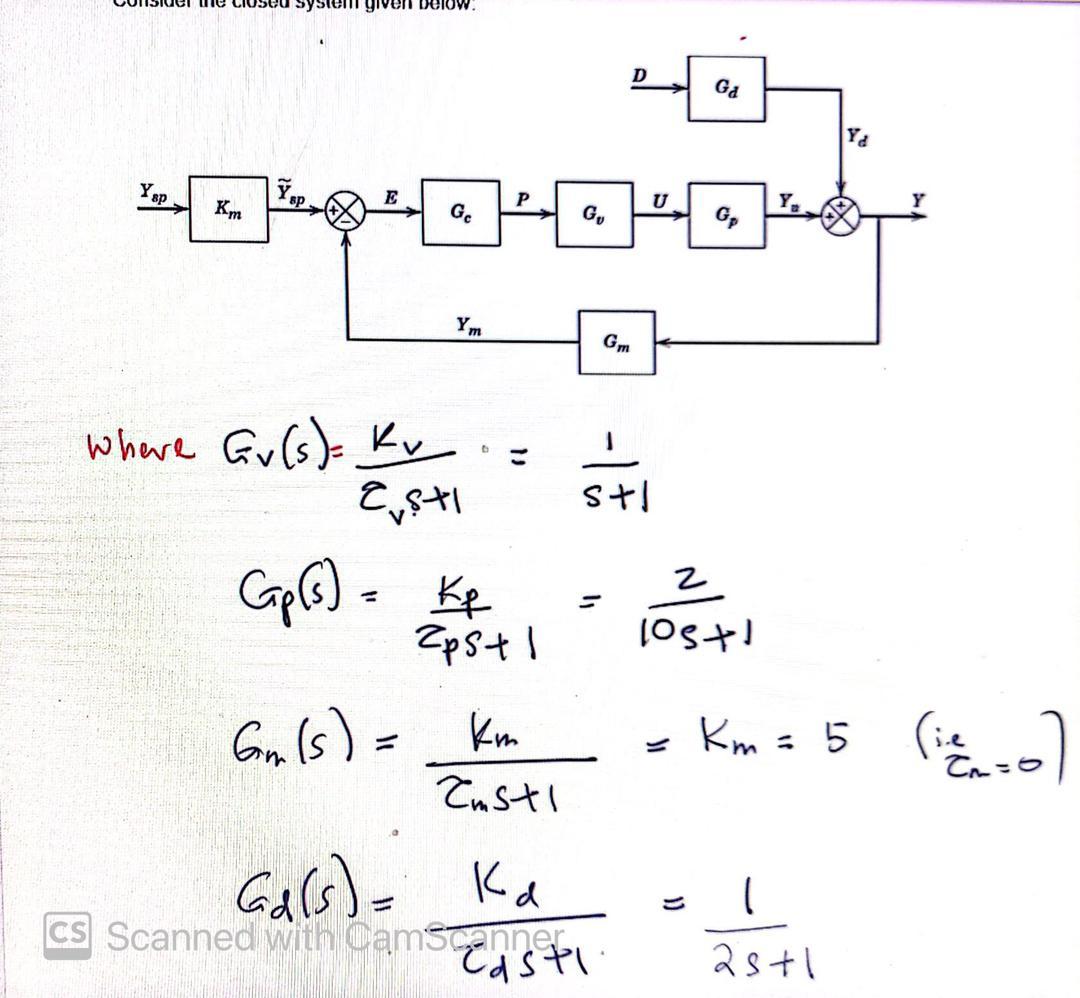
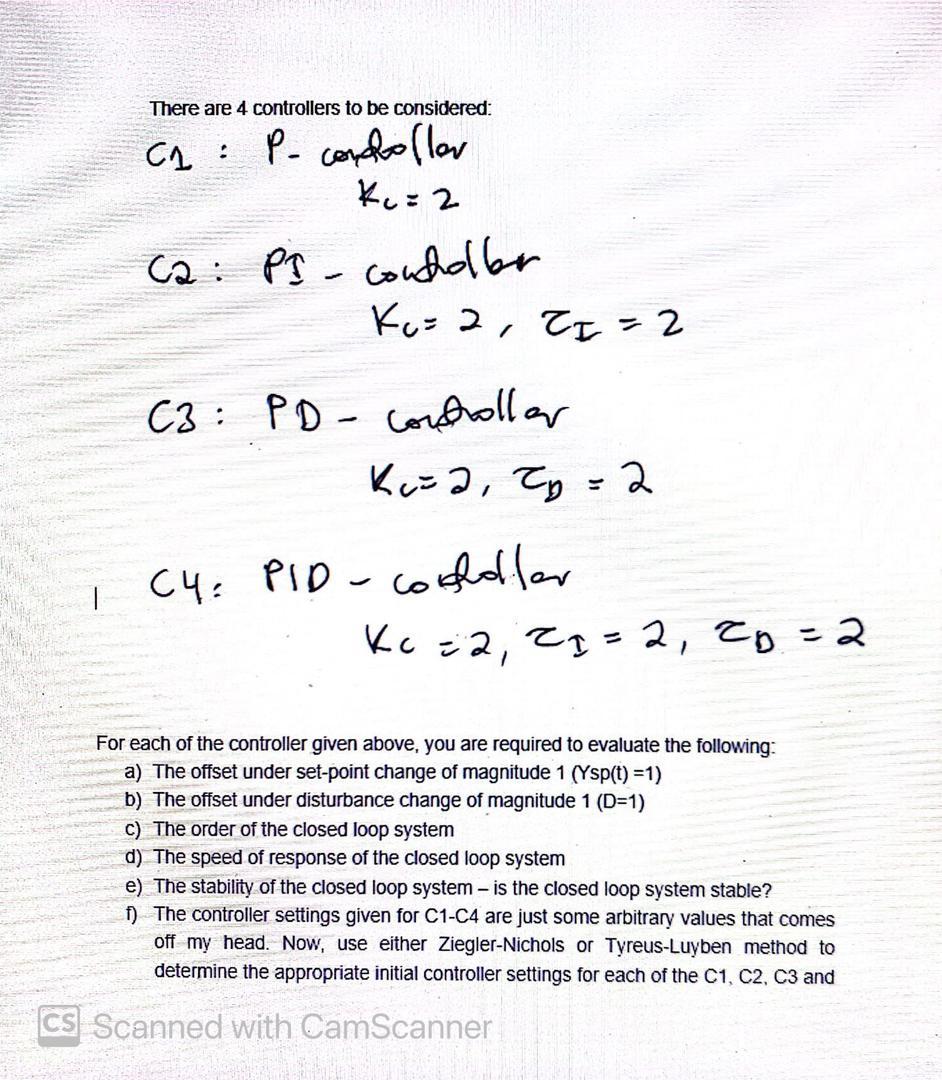
WE USE System given below. D Ga Ya Y sp E U Km Y, GC G Popuko-oh G Ym Gm - 1 1 + 108 +! where Ev (s) kv Eusti Gps). apst! Gm (s) = km Ensti Gars) = CS Scanned with CamScanner Edsti km = 5 (ie ca o ( 5 = Kd astl There are 4 controllers to be considered: CA P. condollar : ku=2 ca: PI coucholler Ku=2, TI = 2 C3: PD - Conhollar kuoa, Ty=2 cooldter Kc =2, 21=2, 2b = 2 C4: PID For each of the controller given above, you are required to evaluate the following: a) The offset under set-point change of magnitude 1 (Ysp(t) =1) b) The offset under disturbance change of magnitude 1 (D=1) C) The order of the closed loop system d) The speed of response of the closed loop system e) The stability of the closed loop system - is the closed loop system stable? f) The controller settings given for C1-C4 are just some arbitrary values that comes off my head. Now, use either Ziegler-Nichols or Tyreus-Luyben method to determine the appropriate initial controller settings for each of the C1, C2, C3 and CS Scanned with CamScanner CA above. Simulate (in MATLAB) and compare the performance of the controllers and discuss the differences of using simply some arbitrary values (as given) and the appropriate tuning methods. 1 cs s which controllers the one discuss your findings. For the settings given in this question, Compare and is best based
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts