

Question: Figure P6.18 shows the HEV system, where parameter values have been substituted. It is assumed here that the speed controller has a proportional gain, K
Figure P6.18 shows the HEV system, where parameter values have been substituted.
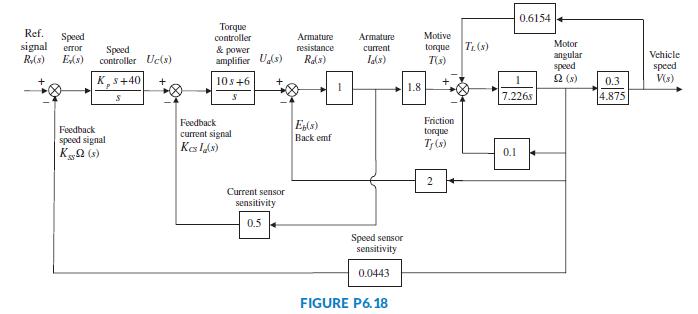
It is assumed here that the speed controller has a proportional gain, Kp, to be adjusted. Use the Routh-Hurwitz stability method to find the range of positive Kp for which the system is closed-loop stable (Graebe, 1995).
0.6154 Torque controller Ref. Speed Armature Motive Armature T (s) Motor signal R(s) error resistance current torque Speed controller Uc(s) & power amplifier Uds) angular speed 2 (s) Vehicle speed V(s) Eds) Ras) Ials) Ts) K,s+40 10s +6 0.3 1.8 7.226s 4.875 Feedback Friction Feedback current signal torque speed signal Back emf KQ (s) Kes lAs) T;(s) 0.1 2 Current sensor sensitivity 0.5 Speed sensor sensitivity 0.0443 FIGURE P6.18
Step by Step Solution
3.38 Rating (160 Votes )
There are 3 Steps involved in it
To apply the RouthHurwitz stability criterion we need to obtain the characteristic equation of the c... View full answer

Get step-by-step solutions from verified subject matter experts