

Question: In Problem 71, Chapter 8, we used MATLAB to plot the root locus for the speed control of an HEV rearranged as a unity-feedback system,
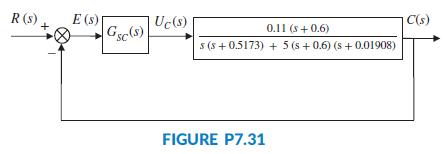
In Problem 71, Chapter 8, we used MATLAB to plot the root locus for the speed control of an HEV rearranged as a unity-feedback system, as shown in Figure P7.31 (Preitl, 2007). The plant and compensator were given by
and we found that K = 0.78, resulted in a critically damped system.
a. Use MATLAB or any other program to plot the following:
i. The Bode magnitude and phase plots for that system, and
ii. The response of the system, c(t), to a step input, r(t) = 4 u(t). Note on the c(t) curve the rise time, Tr, and settling time, Ts, as well as the final value of the output.
b. Now add an integral gain to the controller, such that the plant and compensator transfer function becomes

where K1=0.78 and Zc = K/K1 = 0.4. Use MATLAB or any other program to do the following:
i. Plot the Bode magnitude and phase plots for this case.
ii. Obtain the response of the system to a step input, r(t) = 4 u(t). Plot c(t) and note on it the rise time, Tr, percent overshoot, %OS, peak time, Tp, and settling time, Ts.
c. Does the response obtained in Parts a orbresembleasecond-order overdamped, critically damped, or underdamped response? Explain.
K(s+ 0.6) G(s) = (s+ 0.5858)(s+ 0.0163)
Step by Step Solution
3.47 Rating (163 Votes )
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts