

Question: Given in Fig. P2.8-1 are two digital-filter structures, or realizations, for second-order filters. Example 2.10 It is desired to find m(k) for the equation B
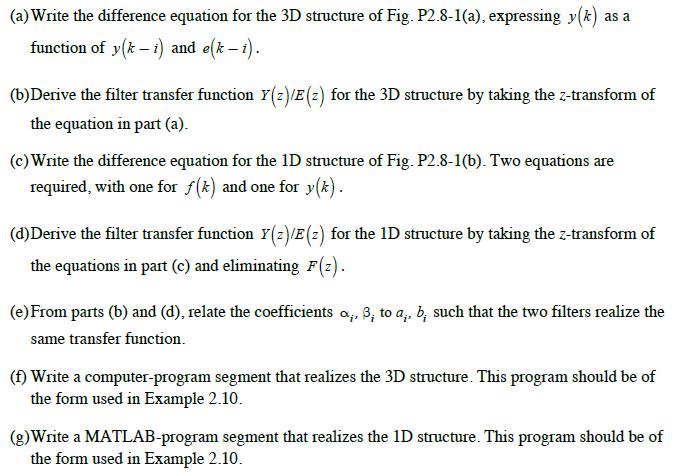
Given in Fig. P2.8-1 are two digital-filter structures, or realizations, for second-order filters.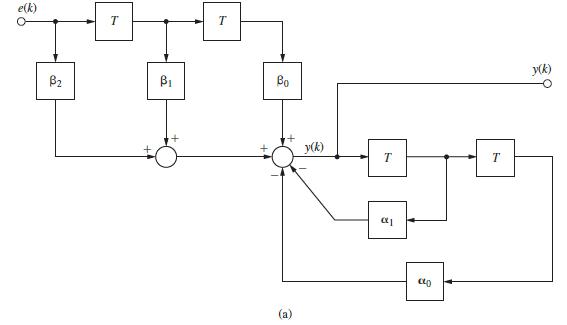
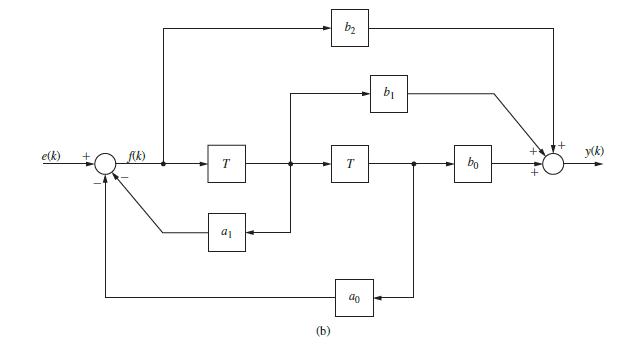
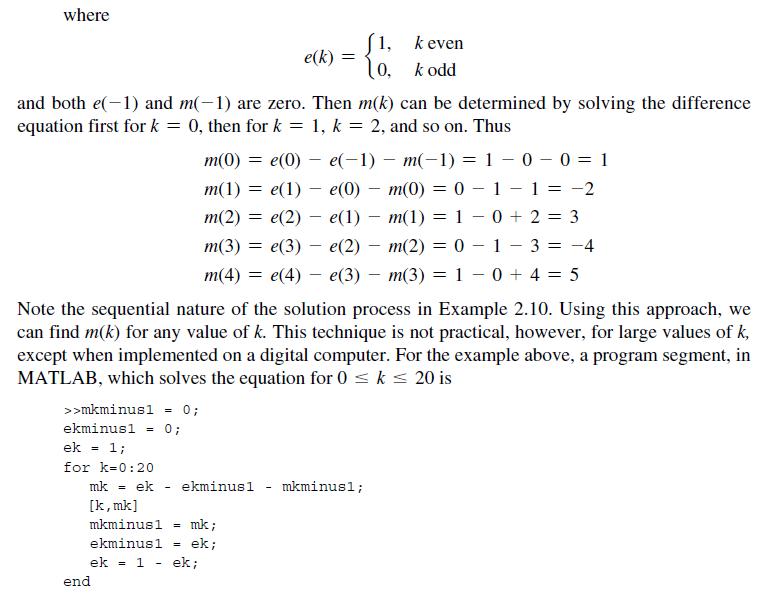
Example 2.10
It is desired to find m(k) for the equation![]()

B T B T Bo (a) y(k) T 7 3 (x1 CLO T y(k)
Step by Step Solution
★★★★★
3.47 Rating (160 Votes )
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

a ykBek ek 1 Boek2 ayk1 yk2 b Y2 B B BozE2 Yz Bz Bz ... View full answer
Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock