

Question: For the simple pendulum shown in Figure E3.20, the nonlinear equations of motion are given by k (t) + sin 0(t) + 0(1) = 0,
For the simple pendulum shown in Figure E3.20, the nonlinear equations of motion are given by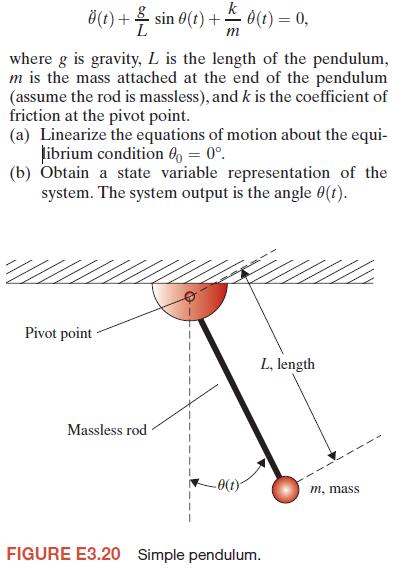
k (t) + sin 0(t) + 0(1) = 0, L m where g is gravity, L is the length of the pendulum, m is the mass attached at the end of the pendulum (assume the rod is massless), and k is the coefficient of friction at the pivot point. (a) Linearize the equations of motion about the equi- librium condition 00 = 0. (b) Obtain a state variable representation of the system. The system output is the angle (t). Pivot point Massless rod L, length 0(t) m, mass FIGURE E3.20 Simple pendulum.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock