

Question: 1 - A robot arm has a joint - control open loop transfer function P ( s ) = 1 2 - s For this
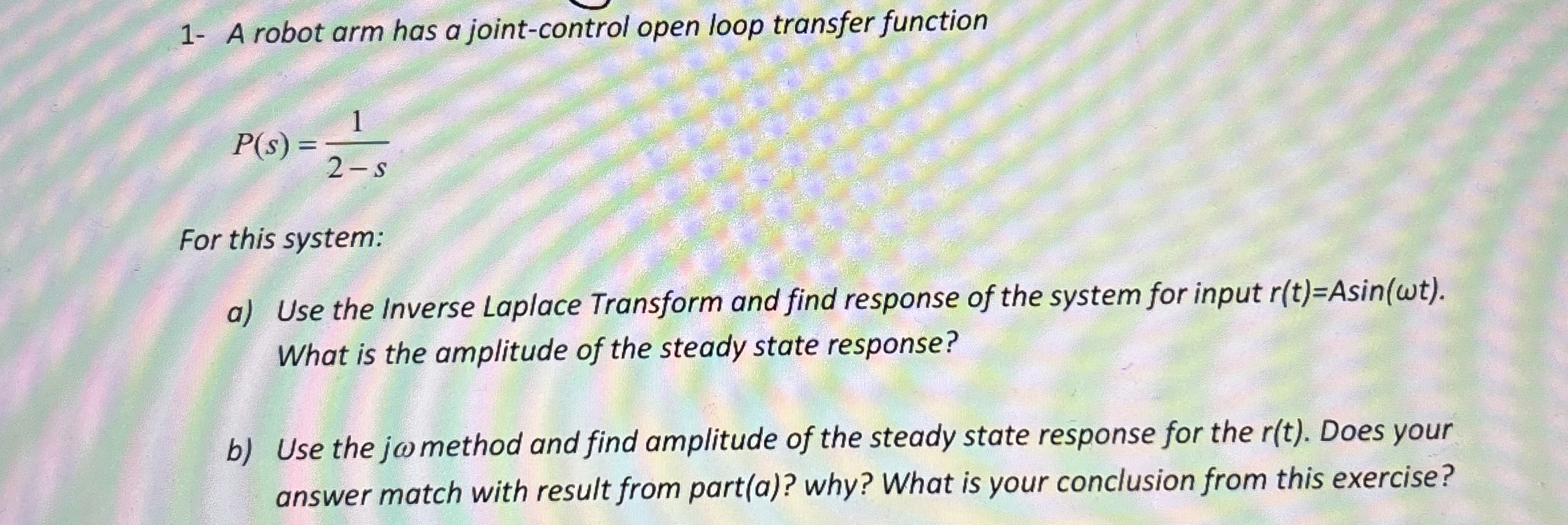
A robot arm has a jointcontrol open loop transfer function
For this system:
a Use the Inverse Laplace Transform and find response of the system for input Asin What is the amplitude of the steady state response?
b Use the jw method and find amplitude of the steady state response for the Does your answer match with result from parta why? What is your conclusion from this exercise?
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock