

Question: 1. Consider the problem of controlling an inverted pendulum on a moving base, as shown in Figure 1 The transfer function of the system is
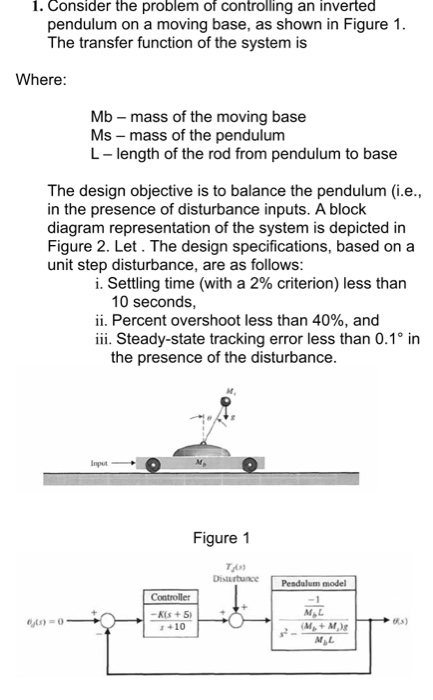
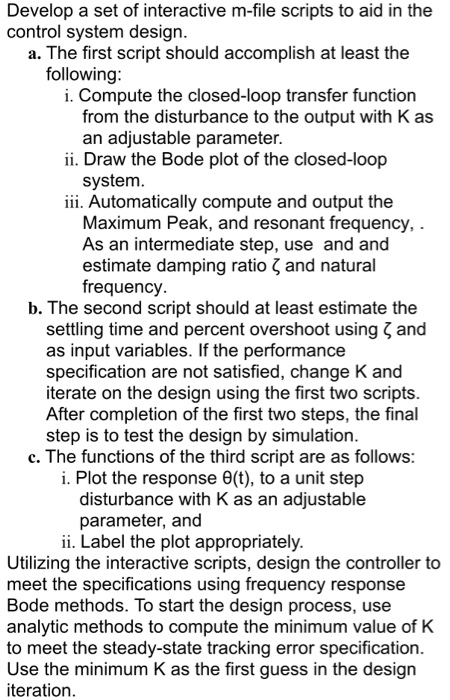
1. Consider the problem of controlling an inverted pendulum on a moving base, as shown in Figure 1 The transfer function of the system is Where Mb mass of the moving base Ms - mass of the pendulum L- length of the rod from pendulum to base The design objective is to balance the pendulum (i.e., in the presence of disturbance inputs. A block diagram representation of the system is depicted in Figure 2. Let. The design specifications, based on a unit step disturbance, are as follows i. Settling time (with a 2% criterion) less than 10 seconds, i. Percent overshoot less than 40%, and iii. Steady-state tracking error less than 0.1 in the presence of the disturbance Input Figure 1 Disurbuno Pendalum model M,L r +10
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts