

Question: In this project, you will control the inverted pendulum that you modeled in your first project. Inverted pendulum consists of a cart with mass M
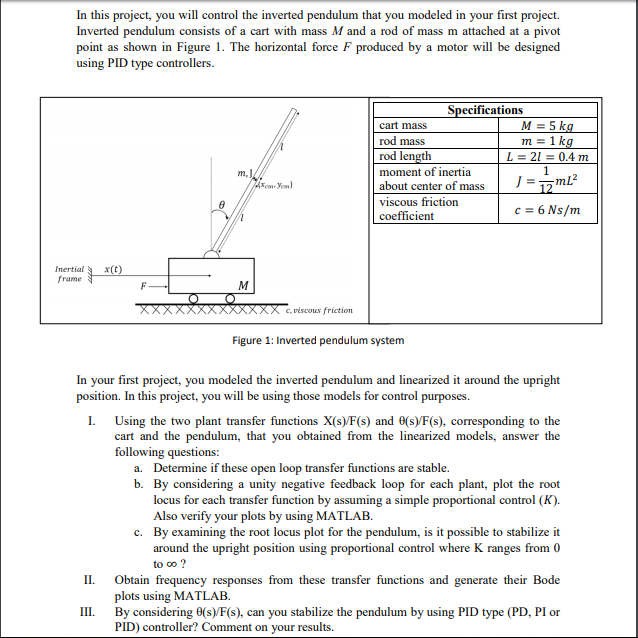
In this project, you will control the inverted pendulum that you modeled in your first project. Inverted pendulum consists of a cart with mass M and a rod of mass m attached at a pivot point as shown in Figure 1. The horizontal force F produced by a motor will be designed using PID type controllers. Specifications cart mass rod mass rod len moment of inertia about center of mass viscous friction coefficient L = 21 = 0.4 m 772. mL en Inertial frame XXXXXKXXXXXX,viscous friction Figure 1: Inverted pendulum system In your first project, you modeled the inverted pendulum and linearized it around the upright position. In this project, you will be using those models for control purposes. L Using the two plant transfer functions x(s)/F(s) and ?(s)/F(s), corresponding to the cart and the pendulum, that you obtained from the linearized models, answer the following questions: Determine if these open loop transfer functions are stable. a. b. By considering a unity negative feedback loop for each plant, plot the root locus for each transfer function by assuming a simple proportional control (K). Also verify your plots by using MATLAB By examining the root locus plot for the pendulum, is it possible to stabilize it around the upright position using proportional control where K ranges from 0 to co ? c. II. from these transfer functions and generate their Bode Obtain frequency responses plots using MATLAB. By considering ?(s)/F(s), can you stabilize the pendulum by using PID type (PD, PI or PID) controller? Comment on your results 111. In this project, you will control the inverted pendulum that you modeled in your first project. Inverted pendulum consists of a cart with mass M and a rod of mass m attached at a pivot point as shown in Figure 1. The horizontal force F produced by a motor will be designed using PID type controllers. Specifications cart mass rod mass rod len moment of inertia about center of mass viscous friction coefficient L = 21 = 0.4 m 772. mL en Inertial frame XXXXXKXXXXXX,viscous friction Figure 1: Inverted pendulum system In your first project, you modeled the inverted pendulum and linearized it around the upright position. In this project, you will be using those models for control purposes. L Using the two plant transfer functions x(s)/F(s) and ?(s)/F(s), corresponding to the cart and the pendulum, that you obtained from the linearized models, answer the following questions: Determine if these open loop transfer functions are stable. a. b. By considering a unity negative feedback loop for each plant, plot the root locus for each transfer function by assuming a simple proportional control (K). Also verify your plots by using MATLAB By examining the root locus plot for the pendulum, is it possible to stabilize it around the upright position using proportional control where K ranges from 0 to co ? c. II. from these transfer functions and generate their Bode Obtain frequency responses plots using MATLAB. By considering ?(s)/F(s), can you stabilize the pendulum by using PID type (PD, PI or PID) controller? Comment on your results 111
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts