

Question: (1) The system whose block diagram is shown has a PID controller that must be tuned to meet the given design specifications: R(s) Y(s) PID
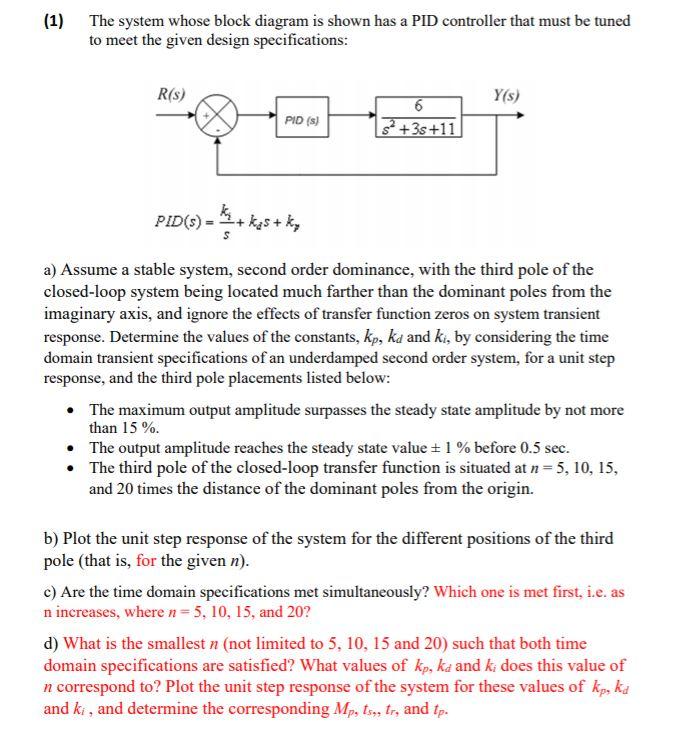
(1) The system whose block diagram is shown has a PID controller that must be tuned to meet the given design specifications: R(s) Y(s) PID (S) 6 32 +38 +11 PID(6) - " + kostky a) Assume a stable system, second order dominance, with the third pole of the closed-loop system being located much farther than the dominant poles from the imaginary axis, and ignore the effects of transfer function zeros on system transient response. Determine the values of the constants, kp, ka and ki, by considering the time domain transient specifications of an underdamped second order system, for a unit step response, and the third pole placements listed below: The maximum output amplitude surpasses the steady state amplitude by not more than 15 %. The output amplitude reaches the steady state value = 1% before 0.5 sec. The third pole of the closed-loop transfer function is situated at n=5, 10, 15, and 20 times the distance of the dominant poles from the origin. b) Plot the unit step response of the system for the different positions of the third pole (that is, for the given n). c) Are the time domain specifications met simultaneously? Which one is met first, i.e. as n increases, where n=5, 10, 15, and 20? d) What is the smallest n (not limited to 5, 10, 15 and 20) such that both time domain specifications are satisfied? What values of kp, ka and k; does this value of n correspond to? Plot the unit step response of the system for these values of kp, ka and ki, and determine the corresponding Mp, ts, tr, and tp
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts