

Question: 1.A pendulum control system is shown below. Suppose the desired angle is r and actual angle is y. Disturbance torque is d. Controller is
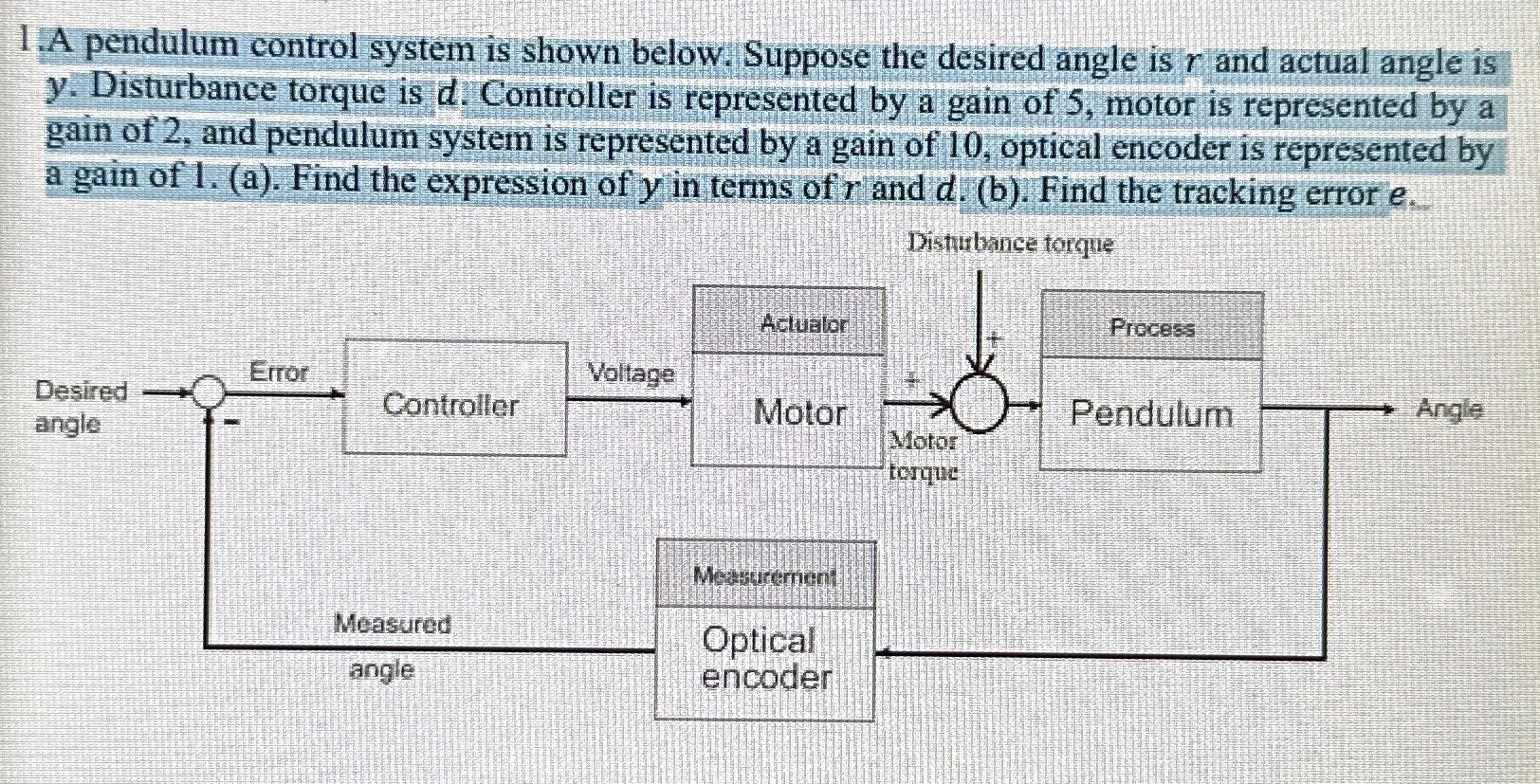
1.A pendulum control system is shown below. Suppose the desired angle is r and actual angle is y. Disturbance torque is d. Controller is represented by a gain of 5, motor is represented by a gain of 2, and pendulum system is represented by a gain of 10, optical encoder is represented by a gain of 1. (a). Find the expression of y in terms of r and d. (b). Find the tracking error e. Disturbance torque Desired angle Error Controller Measured angle Voltage Actualor Motor Measurement Optical encoder Motor torque Process Pendulum
Step by Step Solution
There are 3 Steps involved in it
ery Vhe m z V loe y1... View full answer

Get step-by-step solutions from verified subject matter experts