

Question: 3. Consider the model of the uncontrolled inverted pendulum derived in class (4-3 cos )+- sin 20- 6g -sin = 0 1 (a) Find
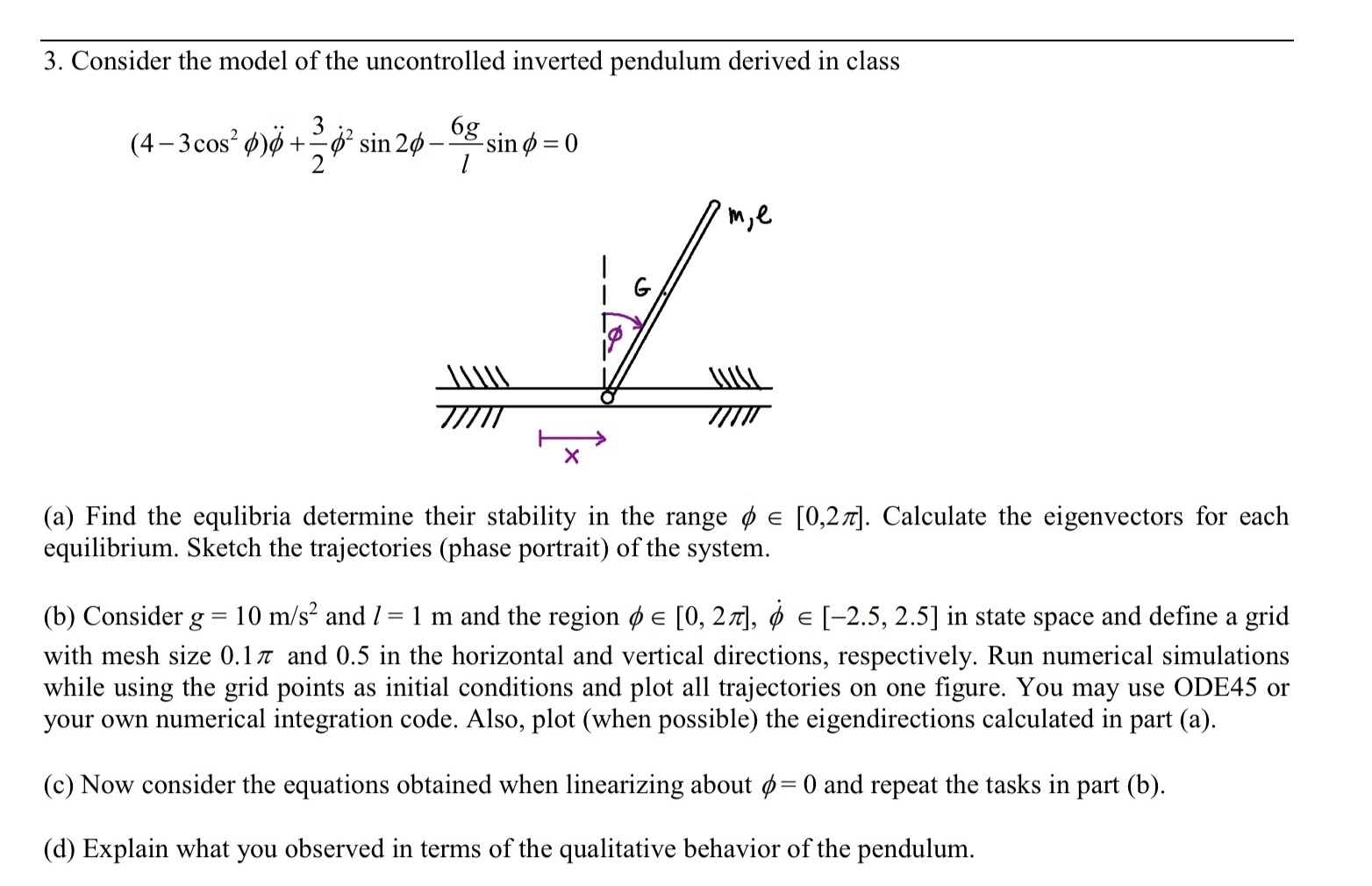
3. Consider the model of the uncontrolled inverted pendulum derived in class (4-3 cos )+- sin 20- 6g -sin = 0 1 (a) Find the equlibria determine their stability in the range = [0,2]. Calculate the eigenvectors for each equilibrium. Sketch the trajectories (phase portrait) of the system. (b) Consider g = 10 m/s and 7 = 1 m and the region = [0, 2], = [2.5, 2.5] in state space and define a grid with mesh size 0.1 and 0.5 in the horizontal and vertical directions, respectively. Run numerical simulations while using the grid points as initial conditions and plot all trajectories on one figure. You may use ODE45 or your own numerical integration code. Also, plot (when possible) the eigendirections calculated in part (a). (c) Now consider the equations obtained when linearizing about = 0 and repeat the tasks in part (b). (d) Explain what you observed in terms of the qualitative behavior of the pendulum.
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts