

Question: A simple robot arm consists of a solid, spherical joint with mass m and radius R, mounted on a thin rod with mass M
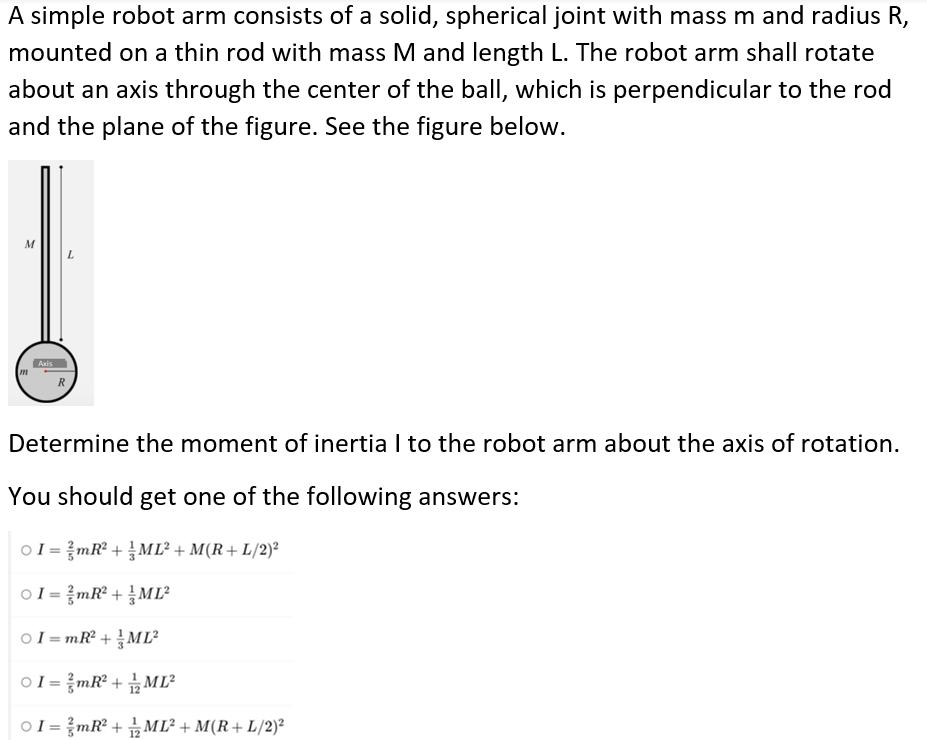
A simple robot arm consists of a solid, spherical joint with mass m and radius R, mounted on a thin rod with mass M and length L. The robot arm shall rotate about an axis through the center of the ball, which is perpendicular to the rod and the plane of the figure. See the figure below. M L Axis m Determine the moment of inertia I to the robot arm about the axis of rotation. You should get one of the following answers: OI=mR+ML+M(R+L/2) 01 = mR + ML OI=mR + ML 01 = mR + ML OI=mR + 2ML+M(R+L/2)
Step by Step Solution
★★★★★
3.43 Rating (162 Votes )
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock