

Question: An adaptive cruise control system is a system controlling the acceleration of the ego car to keep the distance between the ego car and its
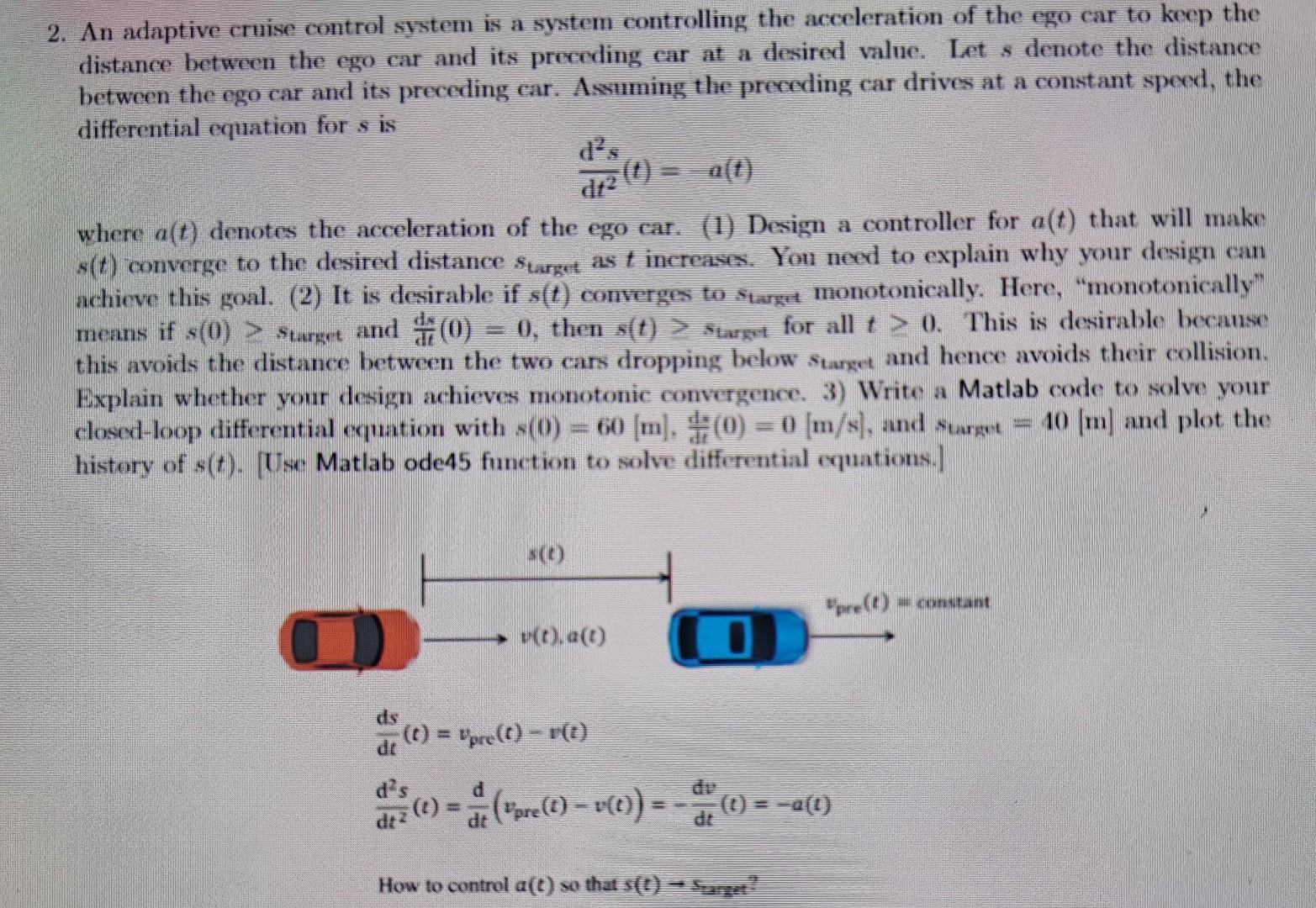
An adaptive cruise control system is a system controlling the acceleration of the ego car to keep the distance between the ego car and its preceding car at a desired value. Let s denote the distance between the ego car and its preceding car. Assuming the precoding car drives at a constant speed, the differential equation for s is dt2d2s(t)=a(t) where a(t) denotes the acceleration of the ego car. (1) Design a controller for a(t) that will make s(t) converge to the desired distance starget as t increass. You need to explain why your design can achieve this goal. (2) It is desirable if s(t) converges to stargat monotonically. Here, "monotonically" means if s(0)s sarget and dtds(0)=0, then s(t)starge for all t0. This is desirable because this avoids the distance between the two cars dropping below starget and hence avoids their collision. Explain whether your design achieves monotonic convergence. 3) Write a Matlab code to solve your closed-loop differential equation with s(0)=60[m], dtd(0)=0[m/s], and surget =40[m] and plot the histery of s(t). [Use Matlab ode45 function to solve differential equations.] dtds(t)=vpre(t)v(t)dt2d2s(t)=dtd(vpre(t)v(t))=dtdv(t)=a(t) How to control a(t) so that s(t) starget
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts