

Question: c++ Alpha Beta Filter Two other classes - GPS and Satellite are already done, found here: http://www.codesend.com/view/179480fd293f7da3a314e80c20cadde6/ Need help with the alpha beta filter class.
c++ Alpha Beta Filter
Two other classes - GPS and Satellite are already done, found here: http://www.codesend.com/view/179480fd293f7da3a314e80c20cadde6/
Need help with the alpha beta filter class.
// AlphaBetaFilter.h
//
// Contains the class definition for a 2D alpha beta filter
//
#pragma once
#include
class AlphaBetaFilter
{
public:
AlphaBetaFilter(double a, double b);
void inializeState(double x, double y, double vx, double vy);
void update(double dt, double x, double y)
std::pair
};
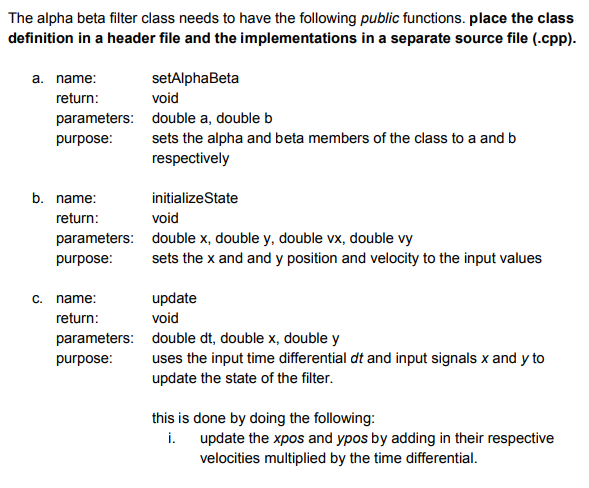
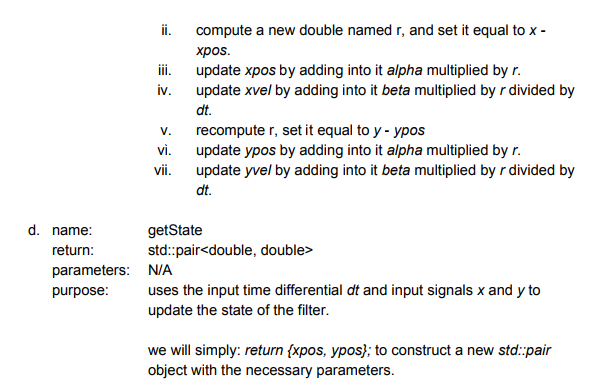
The alpha beta filter class needs to have the following public functions. place the class definition in a header file and the implementations in a separate source file (.cpp) setAlphaBeta void double a, double b sets the alpha and beta members of the class to a and b respectively a. name return parameters: purpose initializeState void double x, double y, double vx, double vy sets the x and and y position and velocity to the input values b. name return parameters: purpose update void C. name return parameters double dt, double x, double y purpose uses the input time differential dt and input signals x and y to update the state of the filter this is done by doing the following i. update the xpos and ypos by adding in their respective velocities multiplied by the time differential The alpha beta filter class needs to have the following public functions. place the class definition in a header file and the implementations in a separate source file (.cpp) setAlphaBeta void double a, double b sets the alpha and beta members of the class to a and b respectively a. name return parameters: purpose initializeState void double x, double y, double vx, double vy sets the x and and y position and velocity to the input values b. name return parameters: purpose update void C. name return parameters double dt, double x, double y purpose uses the input time differential dt and input signals x and y to update the state of the filter this is done by doing the following i. update the xpos and ypos by adding in their respective velocities multiplied by the time differential
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts