

Question: Consider a feedback control system as follows. R(s) E(s) Y(S) C(s) U(s) G(s) Do(s) Y(s) Dm(s) Where G(s) and C(s) are transfer functions of
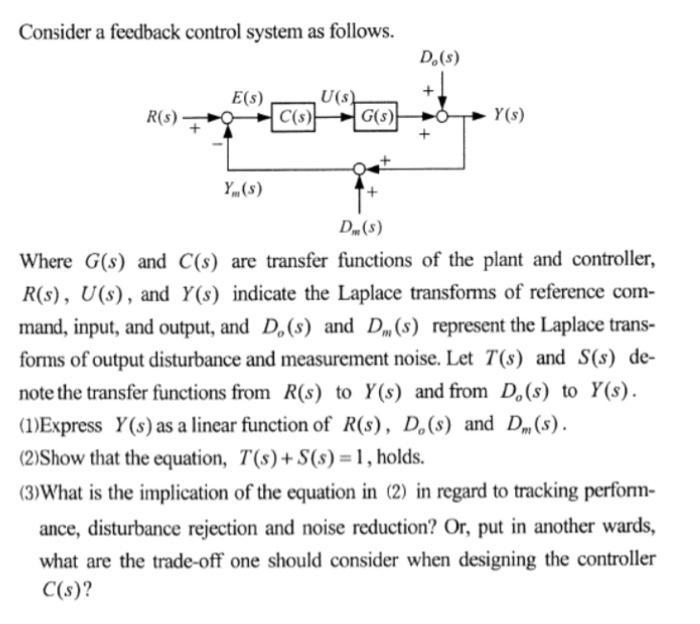
Consider a feedback control system as follows. R(s) E(s) Y(S) C(s) U(s) G(s) Do(s) Y(s) Dm(s) Where G(s) and C(s) are transfer functions of the plant and controller, R(s), U(s), and Y(s) indicate the Laplace transforms of reference com- mand, input, and output, and D. (s) and D, (s) represent the Laplace trans- forms of output disturbance and measurement noise. Let T(s) and S(s) de- note the transfer functions from R(s) to Y(s) and from D, (s) to Y(s). (1)Express Y(s) as a linear function of R(s), D. (s) and Dm(s). (2)Show that the equation, T(s)+S(s) = 1, holds. (3) What is the implication of the equation in (2) in regard to tracking perform- ance, disturbance rejection and noise reduction? Or, put in another wards, what are the trade-off one should consider when designing the controller C(s)?
Step by Step Solution
3.40 Rating (162 Votes )
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts