

Question: Consider the following two - link planar RR manipulator and note the following: End Effector The workspace origin is fixed at the center of Joint
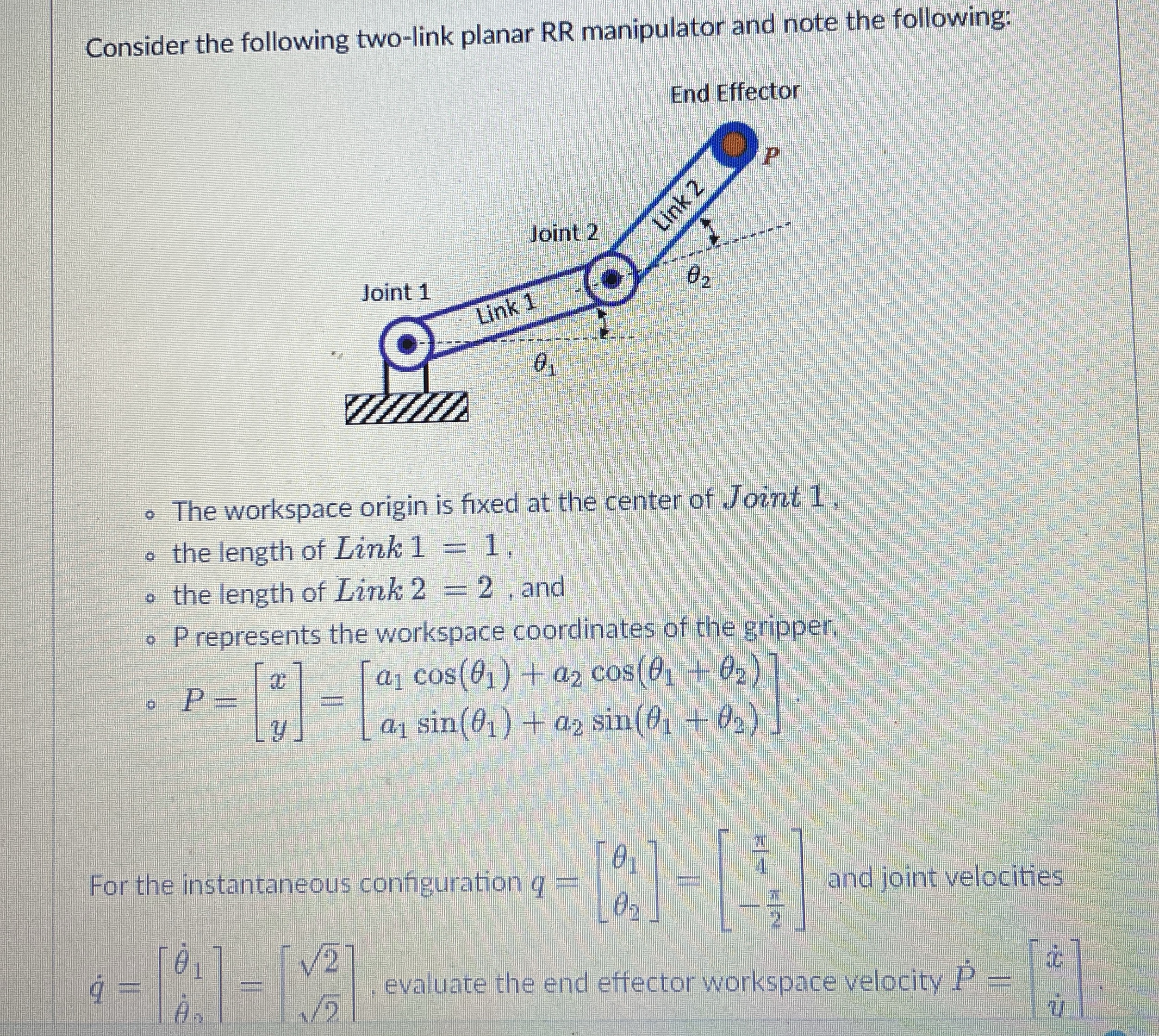
Consider the following twolink planar RR manipulator and note the following:
End Effector
The workspace origin is fixed at the center of Joint
the length of Link
the length of Link and
P represents the workspace coordinates of the gripper,
For the instantaneous configuration and joint velocities evaluate the end effector workspace velocity
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock